













请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






MIT研究团队开发微型低功耗芯片,用于小型无人机导航
2018年06月21日 由 浅浅 发表
436180
0
麻省理工学院的研究人员去年设计了一种微型计算机芯片,专门用于帮助硬币大小的无人机导航,而现在芯片在尺寸和功耗方面都进一步缩小。
该小组由麻省理工学院电气工程与计算机科学系(EECS)副教授Vivienne Sze和1948级航空航天学职业发展副教授Sertac Karaman共同领导,从头开始构建一个完全定制的芯片,重点是减少功耗和尺寸,同时提高处理速度。
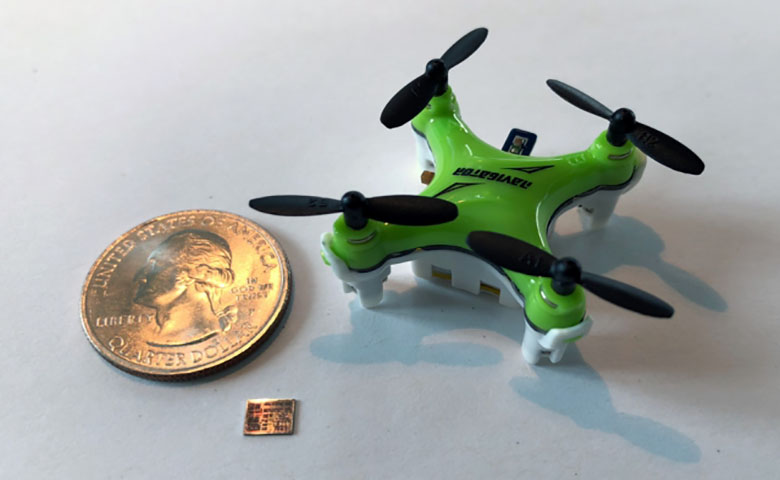
本周他们将在VLSI技术和电路专题讨论会上发表名为“Navion”的新型计算机芯片,面积仅为20平方毫米,大约相当于LEGO minifigure的尺寸,功耗仅为24毫瓦,约等于灯泡供电所需能量的千分之一。
利用微量的功率,该芯片能够以高达每秒171帧的速度处理实时相机图像以及惯性测量,这两种方法都可以用来确定它在空中的位置。研究人员说,该芯片可以集成到指甲大小的“nanodrones”中,在远程或难以进入的地方,全球定位卫星数据不可用的时候帮助导航。
芯片设计也可以运行在任何需要在有限电源设备上长时间导航的小型机器人或设备。
Karaman说:“我可以想象将这种芯片应用于低能量机器人,如指甲般大小的飞行器,或者像气球那样的轻于空气的飞行器,这些设备必须靠一块电池运行数月。或者想象一下医疗设备,它能以非常小的电池以智能的方式导航,因此它不会在你的身体中过热。我们正在开发的芯片可以解决这些问题。”
在过去的几年中,多个研究小组设计出的小型无人机足够小,可以放在手掌中。科学家们设想,这样的小型车辆可以四处飞行,并拍摄周围环境的照片,例如蚊子大小的摄影师或测量员,然后降落在手掌中,然后轻松存放。
但是,一架手掌大小的无人机只能携带不多的电池能量,其中大部分是用来为它的马达提供的的,几乎没有为其他基本操作提供能量,比如导航,特别是状态评估,或者能够确定它在空中的位置。
“在传统的机器人技术中,我们采用现有的现成计算机并对其实施状态估计算法,因为我们通常不必担心功耗,”Karaman说。“但是在每一个需要我们小型化低功耗应用的项目中,我们都必须以一种完全不同的方式思考面临的挑战。”
在他们之前的工作中,Sze和Karaman通过在单个芯片中结合算法和硬件来解决这些问题。他们的最初设计是在现场可编程门阵列或FPGA上实现的,FPGA是一种可配置给定应用的商用硬件平台。该芯片能够使用2瓦的功率执行状态估计,而较大的标准无人机通常需要10至30瓦来执行相同的任务。尽管如此,该芯片的功耗仍然高于微型无人机通常能够承载的功耗总量,研究人员估计其功耗约为100毫瓦。
为了进一步缩小芯片尺寸和功耗,该团队决定从头开始开发芯片,而不是重新配置现有设计。
为了减少芯片的功耗,该组织提出了一种设计,以最大限度地减少在任何给定时间存储在芯片上的数据量(以照相机图像和惯性测量的形式)。该设计还优化了数据流经芯片的方式。
“任何我们暂时存储在芯片上的图像,实际上都是压缩的,所以它需要更少的内存,”麻省理工学院电子研究实验室的成员Sze说。该团队还减少了无关的操作,例如计算零点,这会导致零点。研究人员找到了一种方法来跳过涉及数据中任何零的计算步骤。“这让我们避免了必须处理和存储所有这些零,因此我们可以减少大量不必要的存储和计算周期,从而降低芯片尺寸和功耗,并提高芯片的处理速度。”
通过他们的设计,该团队能够将芯片的内存从之前的2兆减少到0.8兆。该团队在先前收集的无人机产生的数据集上对芯片进行测试,这些无人机在多种环境中飞行,如办公室和仓库式空间。
Sze说,“虽然我们为低功耗和高速处理的特性定制了芯片,但我们也使其具有足够的灵活性,以便它能够适应这些不同的环境,进一步节约能源,关键是在灵活性和效率之间找到平衡。”该芯片还可以重新配置,以支持不同的摄像机和惯性测量单元(IMU)传感器。
从这些测试中,研究人员发现他们能够将芯片的功耗从2瓦降低到24毫瓦,而这足以让芯片以每秒171帧的速度处理图像,这个速度甚至比预测数据集更快。
该团队计划通过在微型赛车上实施其芯片来展示其设计。当一个屏幕显示车载摄像头的实时视频时,研究人员还希望能够显示芯片实时确定其在空中的位置以及用于执行此任务的功率量。最终,该团队计划在一架真正的无人机上测试芯片,并最终在微型无人机上进行测试。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com
广告







广告

写评论取消
回复取消