











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






人工智能非语言交流的新领域:将机器人的情绪映射为触觉表达
2018年05月17日 由 浅浅 发表
363194
0

我们认为人类非常聪明,因为人类拥有多种不同的沟通方式。我们发声,我们有富有表现力的面孔,我们可以做手势。我们似乎有很多交流方式,但我们错过了一些对动物来说很常见的东西:动物可以通过皮肤变化来表达情绪状态,例如遇到某些情况时,猫会毛发竖立,河豚会自行膨胀。我们也许不能像这样表达,但是当我们看到它们时,我们通常可以做出合理的解释。
康奈尔大学的Guy Hoffman的人体机器人协作与伴侣(HRC2)实验室正在研究一种新机器人,该机器人旨在调查这种变形通信的概念,这在机器人技术中还是全新的领域。机器人使用气动弹性体皮肤,可以动态变形,如起鸡皮疙瘩或出现尖刺,这应该有助于更有效地进行交流,尤其是当它想说的是“不要碰我!”。
[video width="1280" height="720" mp4="https://www.atyun.com/uploadfile/2018/05/Goosebumps-Texture-Changing-Soft-Robotic-Skin.mp4"][/video]
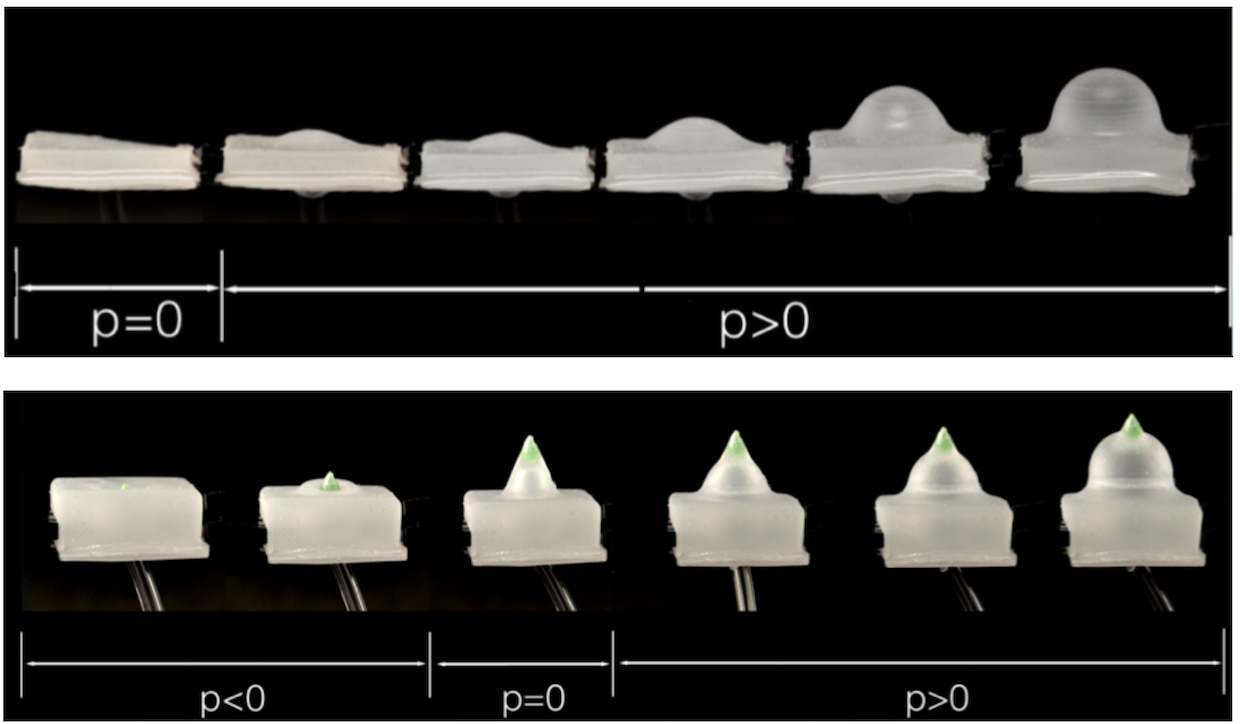
机器人有两个变形模块,每边一个,用于在与其交互时被抓握。每个变形模块由多个布置在网格中的变形单元组成,所有这些变形单元同时启动。变形单元由空心弹性体制成,通过内部通道网络相互连接,内部通道可填充压缩空气。添加空气会使变形单元膨胀,从变形模块的表面弹出,形成既可以看见又可以感觉到的形状。
研究人员为他们的原型机器人装备了两种不同类型的变形单元:膨胀时形成圆形圆顶的鸡皮疙瘩,以及带声音的尖刺。尖刺不能完全变平,但通过反转气动压力,它们可以被吸回弹性体的结构中。每个模块中的所有类似单元都相互连接在一起,这样单个模块就可以随心所欲地跳动。
由于人类没有丰富的触觉通信经验,研究人员必须找出将鸡皮疙瘩和尖刺转化为人类可以理解的方法。这就是为什么在这个社交机器人原型中变形模块安装在小屏幕两侧并具有表现力的原因,这也是为了帮助研究人员了解变形如何能够映射到情感上,机器人有无补充情绪表达。这是他们接下来要做的事情之一。
关于这项研究的论文会在International Conference on Soft Robotics (RoboSoft)上发表。
Q:为什么非语言交流对机器人技术很重要?
A:这很重要,因为非语言行为在人际交流中起着核心作用。人机交互研究表明,机器人使用非言语行为进行交流的能力影响了他们实用性潜力,并且也可能产生心理影响。其他原因也包括让机器人使用非语言行为可以使它看起来更熟悉,而不只是冷冰冰的机器。
Q:你为什么认为没有更多的触觉表达实验来作为机器人沟通的方式?
A:大多数社交机器人的研究侧重于面部表情,大肢体运动,姿势或语调。这是因为它们是人类非语言表达最突出的渠道。所以从某种意义上说,这是社交机器人设计师最为熟悉的途径。其他动物皮肤变形的变化更为明显。然而,应该注意的是,由于外部或内部刺激,我们人类也会呈现皮肤变形变化,例如鸡皮疙瘩。
与更传统的非言语领域相比,研究将皮肤变形做为情绪的研究也少得多,而面部表情和身体运动具有丰富的情感映射历史,无论是艺术、生物学还是社会科学。
Q:是什么启发你开发这个系统?
A:我们的灵感主要来自动物,当它们面对外部或内部刺激时,它们会突出显示其皮肤变形的变化。达尔文在他的著作“人与动物的情感表达 ”一书中精心描写了非言语行为和情绪。这包括鱼类,爬行动物,鸟类和哺乳动物,这表明它比面部表情(可以说是哺乳动物主要使用的)和姿势更为基本地表达情感。
我们认为这很有用的另一个原因是,皮肤变化一次在两个通道上运行:它们可以通过视觉和触觉进行感知。这可以提供人与机器人之间的新型交互。
Q:虽然一些动物使用变形变化来积极表达自己,但人类通常不会。你能否解释一下你如何能够将人体可以识别的变形变化转化为情绪表达?
A:人类是动物物种家族中不可或缺的一员,并与其中许多动物共同发展。因此,我们可以预测,我们有能力读取其他物种发送的一些信号。例如,我们不太可能接近尖刺的河豚,并且可能会感受到毛发竖起的小鸟的痛苦。考虑到机器人不仅仅是人为替换,我们可以利用这种新的通信渠道向人类发出一个信号,看机器人是否处于积极状态。
我们目前正在研究变形变化的动态,包括速度,频率和幅度,以及空间“节奏”,如重复模式。这些自然映射到人类的经验。例如,当我们处于更冷静的状态时,我们的心率和呼吸频率降低到一个较低的频率水平。现在我们正在运行实验来测试这些变形表达式是否可以一致地映射到情感并且可以被用户理解。
Q:这种交流方式可能适用于哪些潜在应用?你认为这项技术最有用的地方在哪里?
A:我们希望变形变化的触觉和更具有“进化基础”的性质首先可以通过生成潜意识或无意识的相互作用来增强机器人情感表达的有效性。例如,如果我们在机器人脸上看到悲伤的表情,我们可能能够读懂机器人的状态,但与我们手掌下尖锐的感觉相比,这种悲伤可能对我们的情绪影响更小。
当视觉和听觉渠道不可用时,这类社交表现力很有用。例如,在军事应用中,可能需要人与机器人之间无声无息的通信模式。在紧急情况下,由于环境条件(如灰尘和烟雾)的影响,可见性可能会被阻止。或者这也可能会为视力障碍患者打开一个情感沟通渠道。
Q:你接下来在做什么?你还想探索其他类型的触觉形状吗?
A:我们现在的主要努力是将情绪映射为触觉表情,并将其与其他现有模式(如面部表情和手势)进行比较。我们也在研究将流体致动器集成到社交机器人外形的机械设计问题。我们还希望研究新的变形形状,并使用计算方法推广此设计过程。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消