











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






哈佛开发机器人手臂,收放海洋软体动物而不会造成伤害
2018年07月23日 由 浅浅 发表
718900
0
广阔的海洋可容纳一百万种尚未被记述的物种。然而,这些生物体中的许多都是软体的,如水母,鱿鱼和章鱼,并且难以用现有的水下工具捕获它们,因为这些工具经常会破坏它们。现在,由哈佛大学Wyss研究所的研究人员,John A. Paulson工程与应用科学学院(SEAS)和拉德克利夫高级研究所开发了机器人设备,可以安全地将精致的海洋生物捕获到折叠的多面体外壳内,该研究报告发表在Science Robotics上。
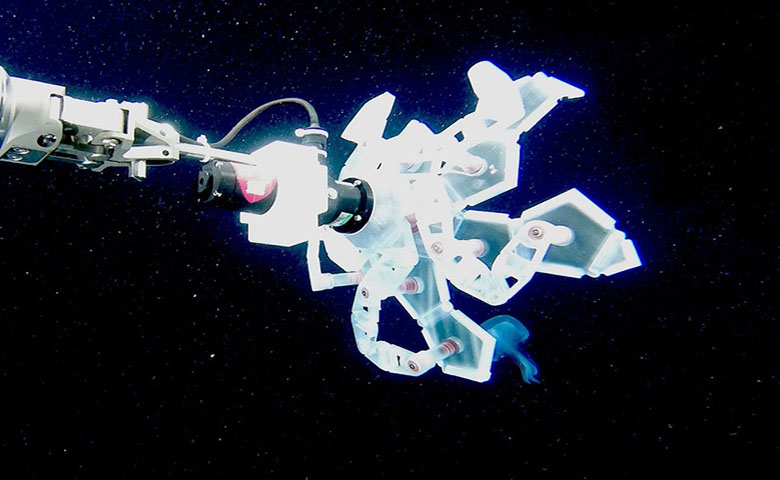
Teoh制造的设备由五个相同的3D打印聚合物“花瓣”组成,这些“花瓣”连接到一系列旋转接头,这些旋转接头连接在一起形成支架。当单个电机向花瓣相遇的点施加力矩时,它会使整个结构围绕其关节旋转并折叠成一个空心的十二面体(如十二面,几乎呈圆形的盒子),它的名字为旋转驱动的十二面体(RAD)。折叠完全由关节的设计和花瓣本身的形状决定,不需要其他输入。
该团队在康涅狄格州Mystic的神秘水族馆测试了RAD采样器,并在水下成功收集并释放了月亮水母。在对采样器进行修改以使其能够承受开阔的海洋条件后,他们将其安装在由加利福尼亚州蒙特雷的蒙特利湾水族馆研究所(MBARI)提供的水下遥控飞行器(ROV)上,并使用ROV的操纵臂和人控操纵杆操作采样器,深度为500-700米(1,600-2,300英尺)。该团队能够捕获其自然栖息地内的鱿鱼和水母等软物,并释放它们而不受伤害。
Teoh表示,“RAD采样器设计非常适合深海环境,因为控制它非常简单,因此可以打破的元素更少。它也是模块化的,所以如果有什么东西坏了,我们可以简单地更换那个部分并将采样器送回水中,这种折叠也非常适合在太空中使用,因为它也是一个低重力,不适宜居住,操作任何设备都具有挑战性的环境。”
Teoh和Phillips目前正在开发一种更加坚固的RAD采样器版本,用于重型水下任务,如海洋地质学,而Gruber和Wood则专注于进一步改进采样器更精细的能力。“我们想为采样器添加摄像头和传感器,以便将来我们可以捕获动物,收集大量有关它的数据,如它的大小,材料属性,甚至它的基因组,然后再进行释放。”
Wood指出,“我们小组与海洋生物学界的合作为软机器人和折纸工程领域打开了大门,我们希望将这些技术用于解决完全不同学科的问题,我们很高兴看到这种协同作用产生的新颖的解决方案。”
论文:robotics.sciencemag.org/content/3/20/eaat5276?rss=1

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消