











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






斯坦福大学研究者开发电子皮肤,使机器人手操纵复杂活动
2018年11月22日 由 浅浅 发表
258302
0
 机器人正在努力掌握诸如碾碎啤酒罐和跑步之类的活动。但是当涉及到需要更多技巧的任务时,比如处理覆盆子而不会造成损坏,机器人就会失败。
机器人正在努力掌握诸如碾碎啤酒罐和跑步之类的活动。但是当涉及到需要更多技巧的任务时,比如处理覆盆子而不会造成损坏,机器人就会失败。现在,事情有了新的进展,斯坦福大学的研究人员通过由电子皮肤制成的橡胶手套,给机器人的手带来了类似人类的灵活性。
电子皮肤模仿人体皮肤分层的方式,让机器人肢体感受到压力,因此它知道如何控制它的力量。领导压力传感器开发的硕士生Marc Negre表示,这有助于提高未来家用机器人,机械厨师和外科医生机器人的能力。
他表示,“最终目标是能够在不滑动的情况下操纵不同方向的玻璃等物体,在食品工业环境中处理精致物体,或者在移动身体部位或工具时需要高灵巧度的手术机器人。”
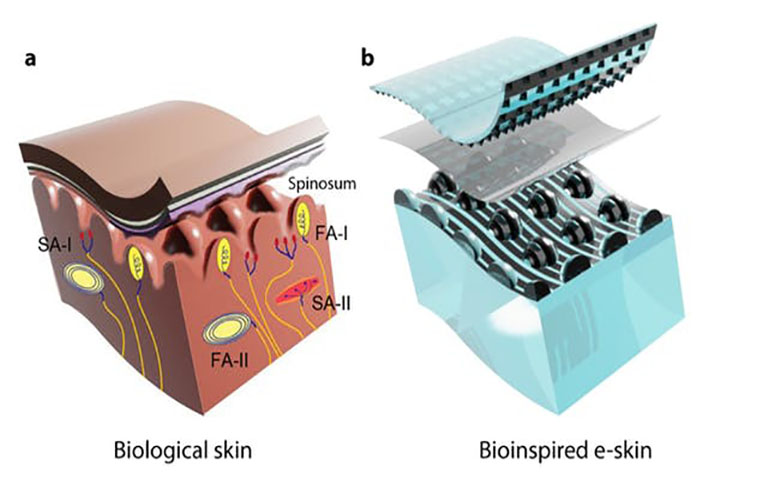
在周三发表在“科学机器人”杂志上的一篇论文中指出,团队是根据我们手上的神经末梢和一种被称为spinosum的坑坑洼洼的皮下组织来建模电子皮肤的。
当人类捡起东西时,我们的外层皮肤会更接近spinosum微型凸起和凹陷。我们抓住的东西越坚硬,我们的皮肤越接近凸起,这给我们带来了更强大的触感。Negre基本上为机器人手套重建了相同的肉质地形。
“制造工艺的发展确实具有挑战性和令人兴奋,”他解释说,“我们需要建造由橡胶和导电材料制成的1毫米微小凸起。”
但是,在医院接受电子皮肤覆盖的机器人外科医生之前,还有很多工作要做。目前,这种机械手只会擅长重复性任务,例如举起鸡蛋并将其放入纸箱中。
团队需要弄清楚如何进一步将传感器嵌入机器人系统中,并让它了解它所接触的内容。Negre说这还需要几年时间,研究人员复制人体器官的能力越来越强。
论文:robotics.sciencemag.org/content/3/24/eaau6914

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消