











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






训练机器人抓握物体能力,速度与成功率大幅提高
2019年01月17日 由 浅浅 发表
220774
0
 几年来,我们一直在关注Dex-Net在抓取方面的进展,加州大学伯克利分校在《科学机器人》上发表了一篇论文,介绍了Dex-Net 4.0。关于这个最新版本的Dex-Net,最令人兴奋的一点是它能够以每小时300次的速度,成功抓握95%从未见过的物体,这要归功于额外的灵活性,使机器人可以在两种不同类型的夹具之间进行动态选择。
几年来,我们一直在关注Dex-Net在抓取方面的进展,加州大学伯克利分校在《科学机器人》上发表了一篇论文,介绍了Dex-Net 4.0。关于这个最新版本的Dex-Net,最令人兴奋的一点是它能够以每小时300次的速度,成功抓握95%从未见过的物体,这要归功于额外的灵活性,使机器人可以在两种不同类型的夹具之间进行动态选择。在某些情况下,人类选择这些物体的速度几乎是机器人的两倍,每小时400到600次。而且人类的成功率接近100%,这是可以合理预期的,如果你允许多次尝试选择相同的对象,成功率可能会达到100%。我们为机器设定了一个非常非常高的标准。
我们之所以如此擅长挑选和抓握物体,部分原因是我们有着丰富的经验,比如对物体的形状、大小和重量、不同材料的摩擦特性,以及当我们接触它们时,它们是如何变形的。我们甚至不需要有意识地去思考它们,就能在头脑中生成详细的模型,轻松地掌握和捡起未知的物体。
然而,机器人不能像我们一样,接触到同样的经验模型。相反,他们依赖于以任务为中心的学习。Dex-Net通过模拟训练来学习如何抓取物体,使用了数百万张3D物体的合成深度图像以及略微随机化的物理效果,以便更好地将模拟成功转化为现实。
这种人为引入的不确定性帮助系统管理传感器噪声,机器人随时间的推移校准的变化,你可能通过训练机器人得到更加真实的结果,但这意味着你受到时间和机器人数量的限制,谁愿意等待呢?
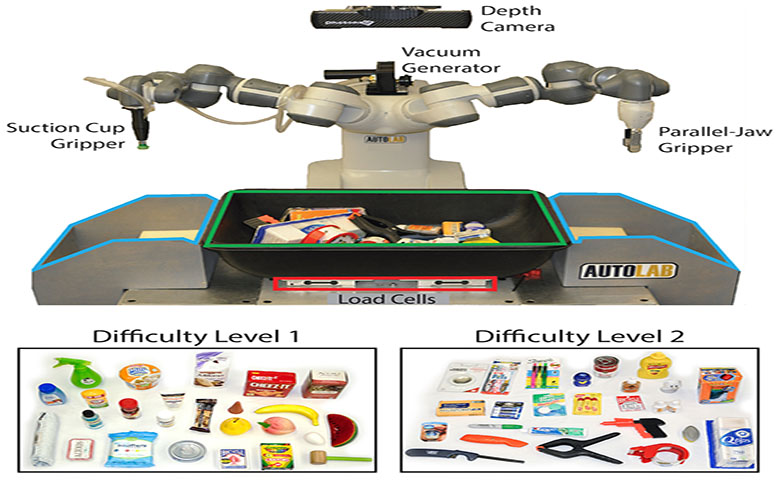
Dex-Net 4.0的独特之处在于它所开发的抓握策略是“双手的”,因为双臂机器人可以决定使用两个手臂中的一个。但与双手灵巧的人类不同,这种特殊的机器人在每只手臂上都有一个不同的抓手:一个可以夹紧抓握的双指抓手和一个吸力抓手。
根据抓取质量的估计,Dex-Net选择哪个抓手能更可靠地拾取目标物体。这种技术可以非常快速,非常可靠地抓取。Dex-Net也可以扩展到其他类型的夹具。通过额外的训练(以及可选的机器人手臂),你可以为静电夹持器,五指指针,壁虎脚趾夹具或其他任何你能想到的东西生成抓取选项。
当然,5%的无法成功掌握的情况总是很有趣,这里有一些例子:
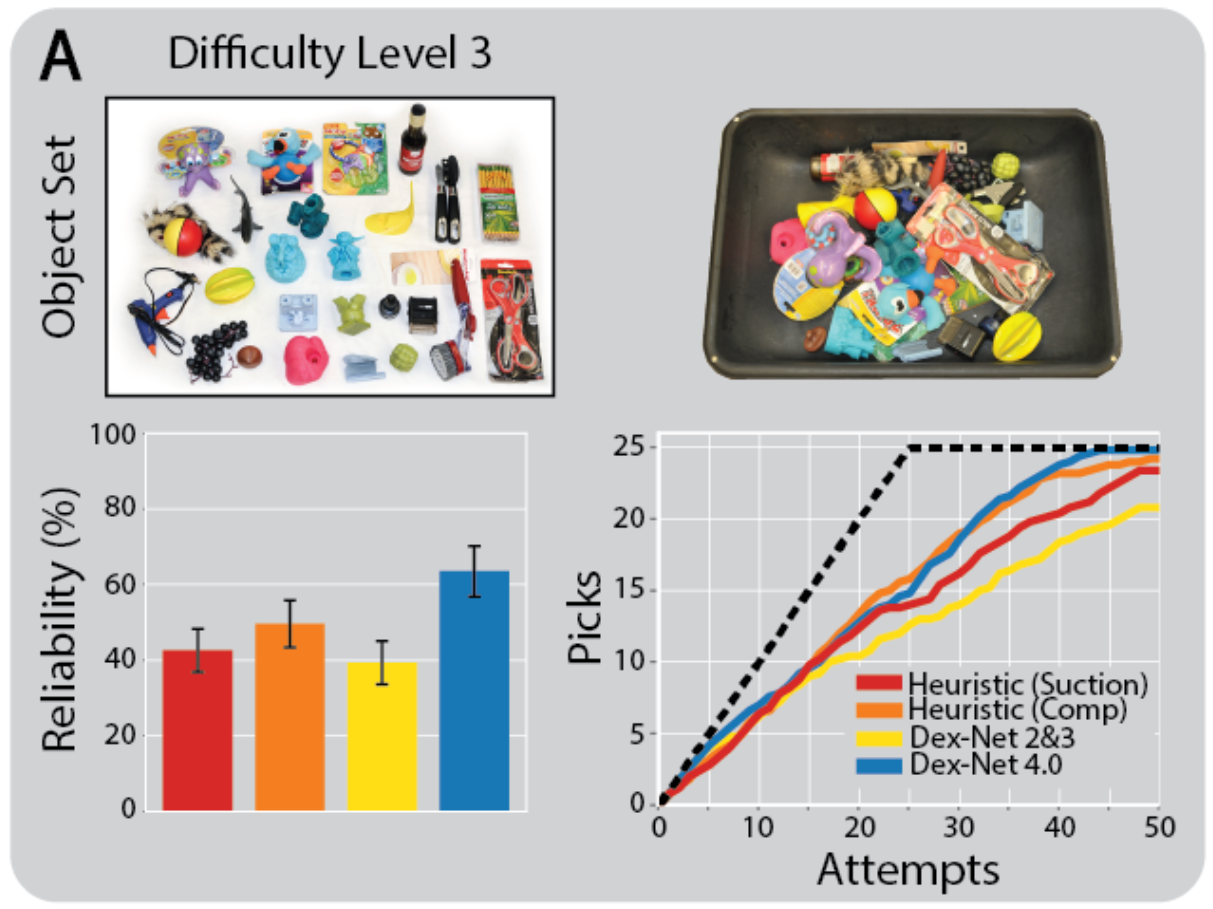
第一张图片显示了“对抗性”的对象,由于对抗性的几何形状、透明性、推测性和变形性,这些对象尤其难以掌握。Dex-Net仅在63%的情况下成功地抓握这些对象,当系统记住以前的故障,并稍微移动几下,它的成功率会提高到80%。
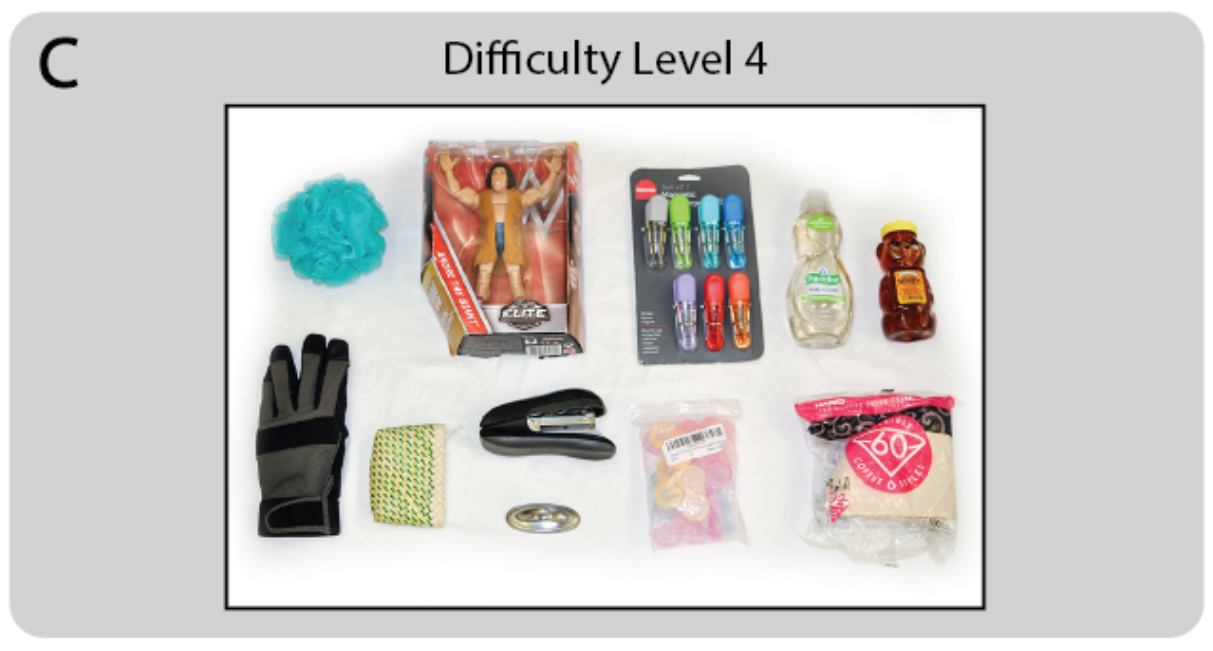
第二张图显示了Dex-Net 4.0完全无法抓握的对象,由于透明度等影响深度感应的反射特性,以及材料特性,如孔隙率和变形性(松散的包装),影响物体表面形成真空密封的能力。我们应该注意的是,夹具以及夹具的训练没有包括力感或触觉感这样的东西,所以仍然有一些选项还没有探索。
同样值得考虑的是,是否存在一个点,在这个点上,低于100%的准确率是可以接受的。管理抓取失败有许多现实的方法:例如,可以让机器人从一个垃圾箱中尽可能地拾取所有东西,然后将剩余的东西给人类来处理。或者在某种程度上,对包装进行调整,机器人更容易一直难以看到或抓住的物品。
不管怎样,这是时间的问题,而不是一个假设问题,供应链越来越需求自动化,也许能够实现的时间也会大大缩短。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消