











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






机器狗ANYmal,不怕摔倒,移动速度更快
2019年01月21日 由 浅浅 发表
895500
0
 瑞士苏黎世联邦理工大学的科学训练了一只机器狗ANYmal,能够抵抗人类多次踢打,摔倒后可自行调整恢复。
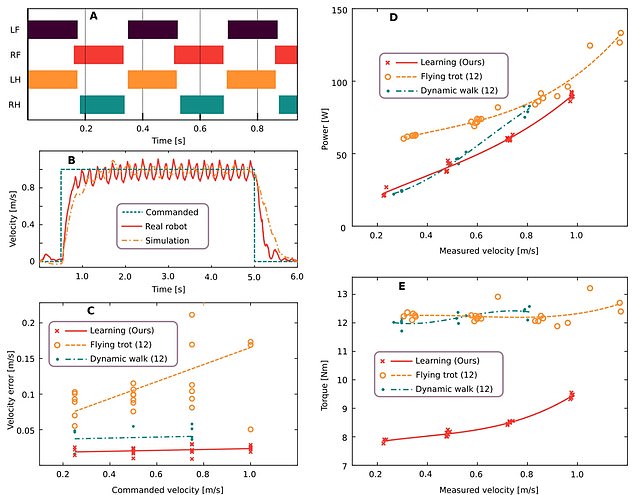
瑞士苏黎世联邦理工大学的科学训练了一只机器狗ANYmal,能够抵抗人类多次踢打,摔倒后可自行调整恢复。该研究结果发表在周三发表在Science Robotics上的一篇新的论文中。研究人员使用人工智能训练机器人,使其能够比以往更快地移动和响应,速度大约提高了25%。
[video width="1024" height="576" mp4="https://www.atyun.com/uploadfile/2019/01/1024x576_MP4_3785457169277537622.mp4"][/video]
这不是一件容易的事。足式机器人是当今机器人技术面临的最大挑战之一。动物的动态和敏捷动作是人类现有的方法无法模仿的。
通常情况下,研究人员依赖于廉价且安全的模拟,但无法准确捕捉复杂机器人的动态。而科学家开发了一种神经网络系统,机器人可以从中快速学习和适应。
“利用模拟训练的策略,足式机器人实现了超越现有方法所能达到的运动技能:ANYmal能够精确,高效地跟踪高水平的身体速度指令,比以前跑得更快,即使在复杂的情况下也能从跌倒中恢复过来。”
它还使用了一种强化学习的方法,机器人通过反复试验来学习,一遍又一遍地完成一系列任务,直到它正确反应。由于涉及许多因素(例如维持平衡所涉及的所有属性),以及由于巨大的时间投入,因此对于机器人来说这样的测试是困难的。
在找到解决第一个问题的方法之后,研究人员找到了解决第二个问题的方法。研究人员创造了一个可以在简单的台式计算机上运行的机器人虚拟版本。
研究人员指出,允许机器人在虚拟环境中学习的速度比在现实世界中快1000倍。他们让虚拟机器狗自行训练长达11个小时,然后将结果下载到实体机器人。
测试显示该方法非常有效。ANYmal的新版本和改进版本更加敏捷(能够阻止人类将其踢倒,如果它倒下也可以自行调整),并且速度大约提高了25%。

研究人员多次踢动机器人,在某些情况下非常有力。但机器人的四肢调整得很快,甚至都不会翻倒。但如果它真的倒下,它会自行翻转使其恢复原状。而能够不惧摔倒,意味着四足机器人在未来对人类更有用。
研究指出,四足机器人可能会在森林和山区救人,爬楼梯到建筑工地搬运重物,检查无结构的地下隧道,甚至探索其他星球。它们有可能实现人类和动物能够进行的任何活动。
论文:
robotics.sciencemag.org/content/4/26/eaau5872

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消