











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






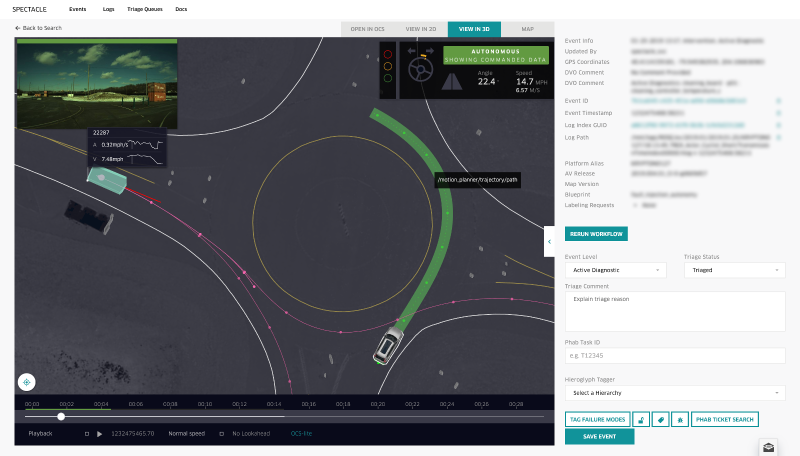
优步开源自主可视化系统,一个基于web的车辆数据平台
2019年02月20日 由 简一 发表
617668
0
 研究公司称,到2025年,超过800万辆自动驾驶汽车将进入公共道路,它们都有一些共同之处:传感器,功能强大的PC和机器学习算法。Nvidia,英特尔的Mobileye,百度和其他公司提供的工具可以直观地呈现这些汽车在现实世界中所看到的(并且已经看到过的),以及它们如何制定(或做出)决策,但这些工具并不完美,它们是基于桌面且非标准化的,它们所摄取的文件规模很大,不太适合共享。
研究公司称,到2025年,超过800万辆自动驾驶汽车将进入公共道路,它们都有一些共同之处:传感器,功能强大的PC和机器学习算法。Nvidia,英特尔的Mobileye,百度和其他公司提供的工具可以直观地呈现这些汽车在现实世界中所看到的(并且已经看到过的),以及它们如何制定(或做出)决策,但这些工具并不完美,它们是基于桌面且非标准化的,它们所摄取的文件规模很大,不太适合共享。但优步认为它可以做得更好。它今天开源了自主可视化系统(AVS),这是一种独立的基于Web的技术,它被描述为理解和共享自动系统数据的新方法。
优步在博客文章中写道,“通过AVS抽象可视化,开发人员可以专注于驱动系统,远程协助,映射和模拟的核心自主功能,AVS使开发人员不必为自动驾驶汽车构建自定义可视化软件。”
优步表示,AVS团队使用模块化作为指导原则,在“层”中构建,使得自主堆栈中的组件可以独立地为上下文进化或定制,而无需进行系统范围的更改。例如,这使得优步的内部团队可以使用它来查看日志和进行地图维护,同时保持其可扩展性,足以满足无人机,机器人,卡车运输和车队管理等行业的需求。
AVS包括两个核心支柱:XVIZ,一个提供,管理和描述生成的自主系统数据的规范,以及streetscape.gl,一个用于构建以XVIZ协议接收数据的Web应用程序的工具包。
根据优步的说法,XVIZ在特定时间通过原始数据,或描述相机图像、激光雷达点云、轨迹和车辆速度等的对象传输一系列离散更新,这些原始数据流包含服务器端编码器和构建器,在客户端包含解码器、数据缓冲区和同步器。
模式结构的视图和显示系统跨客户端工作,使工程师能够探索和查找状态,并将单独的流更新绑定到单个对象中。

AVS的UI捆绑了具有数据的对象的图形面板,对象可以单独设置样式或分配样式类,而流可以通过分层命名组织,元数据部分列出其类型,相对变换等。
至于streetscape.gl,它建立在优步的WebGL驱动的可视化框架集合Vis.gl之上,它具有高度可定制的组件,用于将XVIZ数据流转换为3D视窗,图表,表格,视频等。此外,它还可以处理数据流,相机,动态样式以及与3D对象交互等时间同步,并支持实时回放和具有数十万几何的场景。
优步表示,计划在未来通过更多数据源和规范使性能优化,以及更丰富的功能来增强AVS。
创建AVS是为了满足自主生态系统中每个人的需求,包括工程师,车辆操作员,分析师和专业开发人员。自主工程师可以轻松地用XVIZ描述他们的系统,然后用有限的开销测试和可视化他们的期望,专业开发人员可以使用streetscape.gl快速构建具有强大性能特征和简化集成的数据源无关应用程序。
最后,运营商可以跨多个应用程序以标准可视格式(包括视频)查看数据,从而简化协作,了解知识,深入分析并信任数据质量。
开源:
avs.auto/#/

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消