











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






Festo的仿生机器手融合了AI和气动力学,灵活操纵物品
2019年03月01日 由 深深深海 发表
443915
0
 无论是抓取,握持,转动,触摸,打字还是按压,在日常生活中,我们都会用手来完成最多样化的任务。还有什么比给协作中的机器人配备一个类似于人手的部位更灵活的呢?鉴于此目的,Festo推出了Bionic系列。
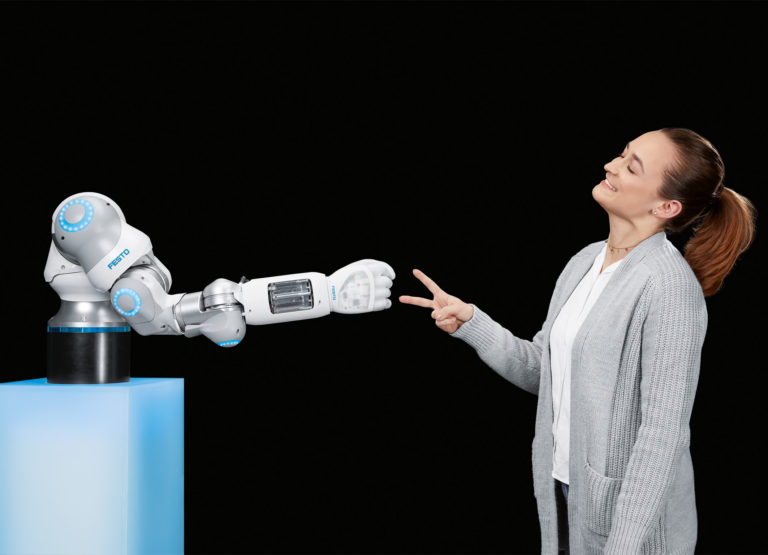
无论是抓取,握持,转动,触摸,打字还是按压,在日常生活中,我们都会用手来完成最多样化的任务。还有什么比给协作中的机器人配备一个类似于人手的部位更灵活的呢?鉴于此目的,Festo推出了Bionic系列。Festo宣布将在2019年汉诺威工业博览会上展示其BionicSoftHand气动式机器人手。结合气动轻型机器人BionicSoftArm,这些未来的概念适用于人机协作。
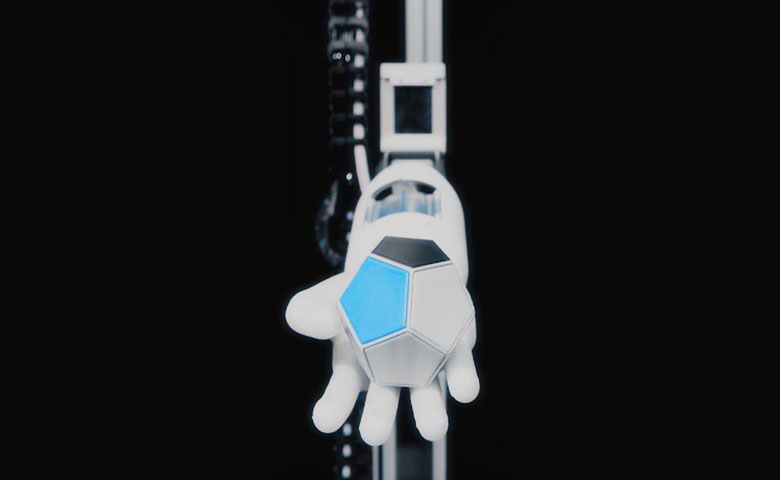
BionicSoftHand采用气动操作,可以安全直接地与人进行交互。与人手不同,BionicSoftHand没有骨头。它的手指由带有空气室的柔性波纹管结构组成。
波纹管由一个特殊的3D纺织涂层包裹在手指中,该涂层由弹性和高强度线编织而成。这种机器人材料很柔软,可以准确地确定结构扩展和产生动力的位置以及防止其扩展的位置。这使其轻便,灵活,适应性强且灵敏,并且能够施加强大的力。
AI为引导
机器学习的方法与人类的方法相当。它们需要对它们的行为给予积极或消极的反馈,以便它们进行分类和学习。BionicSoftHand使用这种强化学习方法。
这意味着,手只是被赋予了一个目标,而不是模仿一个特定的动作。它通过反复试验来达到它的目标。仿生手在接收到反馈信息的基础上,逐步优化自己的动作,直到任务最终解决。AI运行无数的模拟,以帮助它快速找出要做的事情。如果没有AI,机器人可能需要数月才能学会如何操作。
具体来说,BionicSoftHand可以旋转12面立方体,以便先前定义的一侧最终在顶部。借助于数字双胞胎在虚拟环境中教授必要的运动策略,该数字双胞胎借助深度感应摄像机和计算机视觉算法的数据创建。
精确控制
为了最大限度地减少管道的影响,Festo的开发人员专门设计了一个小型数字控制阀,直接安装在BionicSoftHand上。这意味着控制夹持器手指的管子不需要穿过整个机器人手臂。
因此,BionicSoftHand可以快速,轻松地连接和操作,精确控制手指的运动。
由于协作机器人,工厂工人和自动化之间严格分离的日子已逐渐过去,当它们的工作空间汇合时,人和机器将能够在同一工件或部件上同时工作。
BionicSoftArm是Festo的BionicMotionRobot的进一步发展,其应用范围得到了极大的扩展。由于其模块化设计,仿生手臂可以结合多达七个气动波纹管段和旋转驱动器。这保证了在范围和流动性方面最大限度的灵活性。如果有必要,即使在最狭窄的空间里,手臂也能绕过障碍物。
同时,它非常灵活,可以安全地与人合作。BionicSoftArm可以实现直接的人机协作,以及在经典SCARA应用程序中的使用,例如拾取和放置任务。
灵活的应用
根据不同的设计和夹持器的安装,模块化的机器人手臂可以用于多种应用。由于其灵活性,BionicSoftArm可以直接和人类安全交互。
同时,运动学使得仿生手臂更容易适应生产环境中不同位置的不同任务,缩短转换时间,从而完全符合适应性和经济的生产。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消