











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






AI帮助四足机器人预先规划路线,防止碰壁或跌倒
2019年04月22日 由 冯鸥 发表
481458
0
 目前最引人注目的四足机器人可能是波士顿动力的机器人。但这些机器人有一个共同的问题:需要弄清楚该往哪里走,以免卡住或跌倒。
目前最引人注目的四足机器人可能是波士顿动力的机器人。但这些机器人有一个共同的问题:需要弄清楚该往哪里走,以免卡住或跌倒。牛津大学,伊斯坦布尔萨班哲大学和法国国家科学研究中心的科学家团队共同开发出一种新算法,可以为大多数环境生成可行的导航轨迹。
研究者在论文“Contact Planning for the ANYmal Quadruped Robot using an Acyclic Reachability-Based Planner”中指出,“我们提出了一种自动计算方法,为机器人计划其接触具有挑战性的不均匀地形。在不平整和杂乱的环境中航行,往往只有一小部分潜在的立足空间,这仍然是一个悬而未决的问题。”
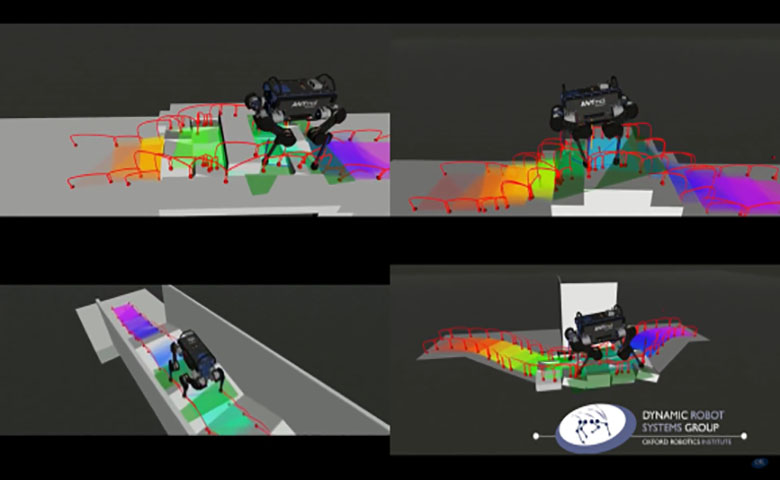
研究人员的方法分几个阶段来应对挑战。一个模型分析环境以识别可能的接触表面,考虑四足机器人(以ANYmal为例)可以推进的地点并避免其接近边缘。然后,相同的模型为机器人的身体创建接触可达的引导路径,使其每一步都有坚实的接触。
“如果主体与环境相交,则意味着碰撞,”论文的作者解释说,“但如果环境不与肢体工作区相交,那么机器人就无法接触环境以创造联系。”
为了减少计算时间,该团队利用随机生成的腿部配置和肢体运动范围的数据库。在路径规划过程中,只保留稳定和不会导致碰撞姿势的配置,其余部分被丢弃,直到找到可行的配置。
每个腿部配置示例都基于两组启发式算法进行评分。一个计算样本配置和机器人标准配置之间的加权距离,另一个使用斜率陡度等变量来确定哪些配置增加了可控性和稳定性。
Gazebo是一个自主机器的仿真环境。他们尝试了逐渐变化的地形,包括平坦的地面、高度变化较小的地面,带有障碍物、高度变化较大的平面(如楼梯)以及高度变化较大的非平坦表面(碎石地形)。
该团队报告称,他们的导航路径规划器非常强大,并且它提供了避免碰撞的轨迹。此外,在任何环境下提前生成约50步的计划只花费不到7秒钟。
不过研究人员也注意到动态模拟的成功率仍然太低,无法在真实世界的机器人上进行无人监督部署,这个问题将在今后的工作中解决。
论文:
arxiv.org/pdf/1904.08238.pdf

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消