











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






8小时缩短到20分钟!新方法自动制造微型机器人
2019年04月29日 由 深深深海 发表
784736
0
 组装一个微型机器人比你想象的要复杂得多。
组装一个微型机器人比你想象的要复杂得多。一对尖嘴镊子,一个显微镜,一双稳定的手以及至少八个小时的时间是必需的。
现在,研究人员可以从这一繁琐的步骤中解脱出来了——多伦多大学工程系的研究人员开发出一种新方法,只需要3D打印机,20分钟就成功组装完毕。
微型机器人
在Eric Diller教授的实验室中,研究人员创造了磁化微型机器人,可以穿过充满液体的血管和人体内的器官,使用磁场无线控制这些微型机器人的运动。
Tianqi Xu表示,“制造这些机器人非常困难且需要耗费大量精力,因为这个过程需要精确,同样由于需要手动装配,使这更为困难,这是我们要解决的问题。”
因此团队开发出一种自动化方法,可以显著减少设计和开发时间,并扩展可以制造的微型机器人的类型。研究结果今天发表在Science Robotics上。
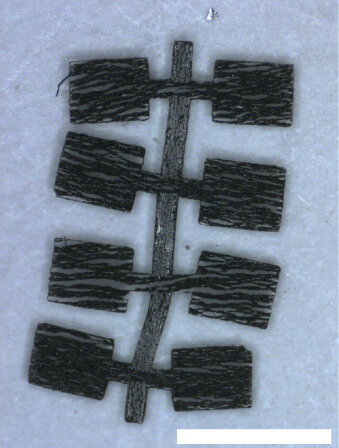
桨状机器人
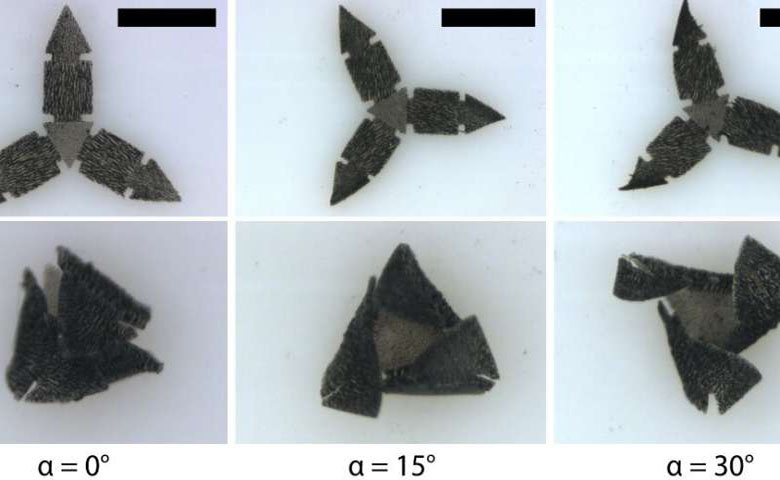
为了展示他们的新技术,研究人员设计了20多种不同形状的机器人,然后将其编程到3D打印机中。然后,打印机构建并固化设计,将磁性图案化颗粒定向为过程的一部分。
Diller表示,“以前,我们会准备一个形状并手动设计它,花几个星期来规划,然后再制作它。而且还只是一种形状,然后,当我们构建它时,我们将不可避免地发现特定的问题,例如,我们可能不得不将它调整得更大或更薄一些。”
优化设计
Xu指出,“现在我们可以对形状进行编程并点击打印,我们可以轻松地迭代,设计和改进它。我们有能力真正探索新的设计。”
研究人员的方法为开发比当前尺寸更小、更复杂的微型机器人打开了大门。他们认为有朝一日机器人体积会更小,甚至减少10倍。
实验室计划使用这一自动化过程来探索更复杂和复杂的微型机器人形状,“作为一个机器人研究社区,我们需要探索这个小型医疗机器人的空间,能够优化设计是非常重要的。”
鉴于未来的医疗应用需要更小和更复杂的微型机器人,如果这种自动化方法得到推广和进一步优化,可能会为研究应用带来更多的便利。
论文:
robotics.sciencemag.org/content/4/29/eaav4494

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消