











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






纳米级无人机PULP Dronet仅重27克,具有强大的自主导航能力
2019年05月29日 由 冯鸥 发表
330813
0
 苏黎世联邦理工学院和博洛尼亚大学的研究人员开发了一个纳米级无人机,名为PULP Dronet,仅有27克,具有深度学习的视觉导航引擎。论文显示无人机可以在一个端到端的闭环视觉管道上运行,以最先进的深度学习算法为动力,实现自主导航。
苏黎世联邦理工学院和博洛尼亚大学的研究人员开发了一个纳米级无人机,名为PULP Dronet,仅有27克,具有深度学习的视觉导航引擎。论文显示无人机可以在一个端到端的闭环视觉管道上运行,以最先进的深度学习算法为动力,实现自主导航。研究人员表示,“团队已经用了六年全力投入合作项目:并行超低功耗平台(PULP),我们的目标是开发一个开源,高度可扩展的硬件和软件平台,以实现功率范围仅为几毫瓦的节能计算,例如物联网的传感器节点和微型机器人,如重量几十克纳米无人机等。”
从昆虫身上获取灵感,小功率高性能
在大型和平均尺寸的无人机中,可用的功率预算和有效载荷使得能够利用高端强大的计算设备,例如由英特尔、英伟达、高通等公司开发的那些设备。
这些设备对于微型机器人来说不是一个可行的选择,会受到它们的大小和功率的限制。为了克服这些限制,该团队决定从大自然中,特别是来自昆虫获取灵感。
“在自然界中,像昆虫这样的微小飞行动物可以执行非常复杂的任务,同时在感知环境和思考时只消耗少量能量,我们希望利用节能计算技术能复制这一功能。”
为了复制昆虫中观察到的节能机制,研究人员最初致力于将高级人工智能集成到纳米无人机的超微功率范围内。事实证明这非常具有挑战性,因为它们必须满足其能量限制和严格的实时计算要求。
研究人员的主要目标是以非常小的功率实现非常高的性能。
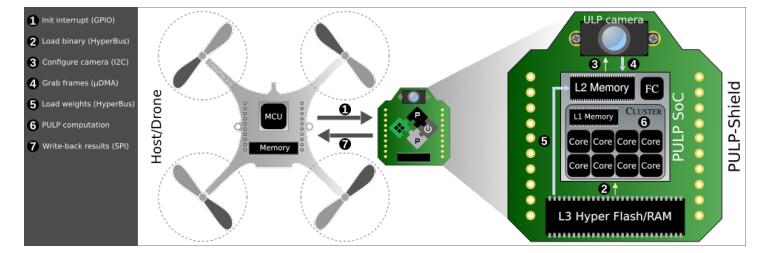 团队表示,“我们的视觉导航引擎由硬件和软件组成,前者是由并行的超低功率范式体现的,由DroNet卷积神经网络(CNN)体现,CNN之前由苏黎世大学的机器人和感知组开发,用于资源无约束的大型无人机,适应了能源和性能要求。”
团队表示,“我们的视觉导航引擎由硬件和软件组成,前者是由并行的超低功率范式体现的,由DroNet卷积神经网络(CNN)体现,CNN之前由苏黎世大学的机器人和感知组开发,用于资源无约束的大型无人机,适应了能源和性能要求。”导航系统采用相机框架并使用最先进的CNN处理它。随后,它决定如何纠正无人机的姿态,使其位于当前场景的中心。CNN也能识别障碍物,如果无人机感觉到迫在眉睫的威胁,就会停下来。
“基本上,PULP Dronet可以沿着街道(或走廊),在遇到意外障碍时采取制动,”研究人员说,“与过去的袖珍飞行机器人相比,真正的飞跃是,实现自主导航所需的所有操作都直接在机上执行,无需人工操作员,也不需要特设基础设施(如外部摄像头或信号),也没有任何用于计算的远程基站(如远程笔记本电脑)。”
高响应性,开源系统
在一系列现场实验中,研究人员证明了他们的系统具有高响应性,可以防止与飞行速度可达1.5米/秒的意外动态障碍物碰撞。他们还发现,视觉导航引擎能够在113米之前看不见的路径上进行完全自主的室内导航。
Palossi及其同事进行的这项研究介绍了一种有效的方法,该方法在具有非常严格的功率限制的设备中集成了前所未有的智能水平。这本身就令人印象深刻,因为在口袋大小的无人机中实现自主导航非常具有挑战性。
“与传统的嵌入式边缘节点相比,我们不仅受到可用能量和功率预算的约束,而且还受到性能限制,”研究人员解释说,“换句话说,如果CNN跑得太慢,无人机将无法及时作出反应,不能防止碰撞或在正确的时刻转弯。”
Palossi及其同事开发的小型无人机可以立即获得应用,例如,一群PULP-Dronets可以帮助检查地震后倒塌的建筑物,到达人类救援人员在较短时间内无法进入的地方,使操作员的生命不会暴露在危险之中。
“人们将从小型,灵活,智能的计算节点中受益的每一个场景现在都更加接近,如动物保护,老人/儿童援助,农作物和葡萄园检查,危险区域的探索,救援任务等等,我们希望研究能够改善每个人的生活质量。”
根据Palossi及其同事的说法,他们最近的研究仅仅是实现真正的生物级机载智能的第一步,仍然有几个挑战需要克服。
在未来的工作中,他们计划通过提高车载导航引擎的可靠性和智能来解决其中的一些挑战。并针对新传感器,更复杂的功能和更好的性能。研究人员开源了他们的所有代码,数据集和训练网络,这也可以激励其他研究团队根据他们的技术开发类似的系统。
论文:
arxiv.org/pdf/1905.04166.pdf
开源:
github.com/pulp-platform/pulp-dronet

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消