











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






AI仅靠雷达测量的数据即可对道路上的物体进行分类
2019年05月31日 由 bie管我叫啥 发表
789674
0
 仅仅依靠雷达数据,真的能够区分汽车、卡车和行人吗?当然,这都要归功于人工智能。
仅仅依靠雷达数据,真的能够区分汽车、卡车和行人吗?当然,这都要归功于人工智能。最新论文中,戴姆勒和卡塞尔大学的科学家们描述了一种新的机器学习框架,它可以对单独的交通参与者进行分类,包括以前仅从雷达数据中不知道的隐藏对象类。
团队声称,这可能对自动驾驶汽车行业特别有用,因为在自动驾驶汽车行业,目标检测仍然是一个令人感兴趣的热门领域。
“与以前的方法相比,整体分类性能可以提高,另外,可以更准确地识别出新的类别,”他们进一步解释说,雷达是能够直接从视野内的多个物体获得速度测量的少数传感器之一,并且与其他传感器相比,它在恶劣天气条件(如雾,雪或大雨)下更加稳健。不过它并不完美:与其他传感器相比,雷达的角分辨率相对较低,这会导致数据表示稀疏。
该团队的解决方案是由80个长短时记忆(LSTM)细胞组成的分类器集合,或能够学习长期依赖关系的特殊的递归神经网络。
他们仅使用98个特征的动态子集(特别是在范围、角度、振幅和多普勒方面的统计推导)、几何特征、以及与多普勒值分布有关的特征,以识别对象之间的关键差异,从而在模型训练和推理过程中具有低计算成本的优势。
为了训练模型,该团队为3800个移动道路使用者实例提供了一个包含300多万个数据点的数据集。通过安装在测试车辆前半部分上的四个雷达传感器(范围大约为100米)采集样本,经过训练的分类器将检测到的对象分成六个部分:行人、行人组、自行车、汽车、卡车和垃圾。
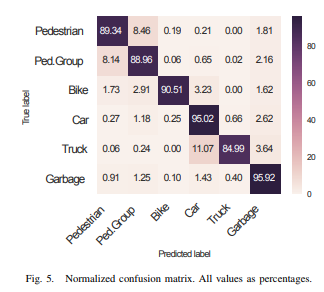
使用标签“行人组”是由于多个行人在数据中无法清楚地分开,而“垃圾”和“其他”类别包括错误检测到工件和不属于上述类别的人或物(如摩托车手,摩托车,坐轮椅的残疾人,缆车,狗)。
那么分类器的整体表现怎么样呢?根据研究人员的说法,它们在分类对象中的平均准确率为91.46%,在共享相同的特征集时甚至更准确。大多数分类错误发生在行人和行人组之间。
团队表示,“提出的结构可以让我们对特征对于识别单个类的重要性有新的认识,这对于开发新的算法和传感器需求至关重要。从训练数据中看到的其他类中识别物体的能力是自动驾驶的重要组成部分。”
对于未来的研究,他们希望通过应用高分辨率的信号处理技术来增强当前的结果,这可能会增加雷达的距离、角度和多普勒分辨率。
论文:
arxiv.org/pdf/1905.11703.pdf

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消