











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






研究人员将主动推理身体感知应用于类人机器人
2019年06月27日 由 马什么梅 发表
187897
0
 机器人研究人员面临的一个关键挑战是,开发能够在涉及不同程度不确定性的情况下与人类及其周围环境相互作用的系统。
机器人研究人员面临的一个关键挑战是,开发能够在涉及不同程度不确定性的情况下与人类及其周围环境相互作用的系统。事实上,虽然人类可以不断地从他们的经验中学习,并在与世界互动的过程中感知他们的身体作为一个整体,但机器人还没有这些能力。
主动推理
慕尼黑技术大学的研究人员最近进行了一项研究,他们试图将“主动推理”应用于人形机器人。他们的研究是欧盟资助的一项名为SELFCEPTION的项目的一部分,该项目将机器人技术和认知心理学联系起来,旨在培养更具洞察力的机器人。
研究人员Pablo Lanillos表示,“引发这项研究的最初研究问题是,为类人机器人和一般的人工智能体提供像人类一样感知自己身体的能力。主要目标是提高它们在不确定性下互动的能力。我们最初制定了一个路线图,将人类感知和行动的一些特征纳入机器人。”
在研究中,Lanillos等人试图更好地理解人类的感知,然后将其建模为人形机器人。这是一项非常困难的任务,因为人类处理感官信息(视觉,触觉等)的许多细节仍然未知。研究人员从Hermann Von Helmholtz和Karl Friston的工作中汲取灵感,尤其是他们的主动推理理论,这是最具影响力的神经科学结构之一。
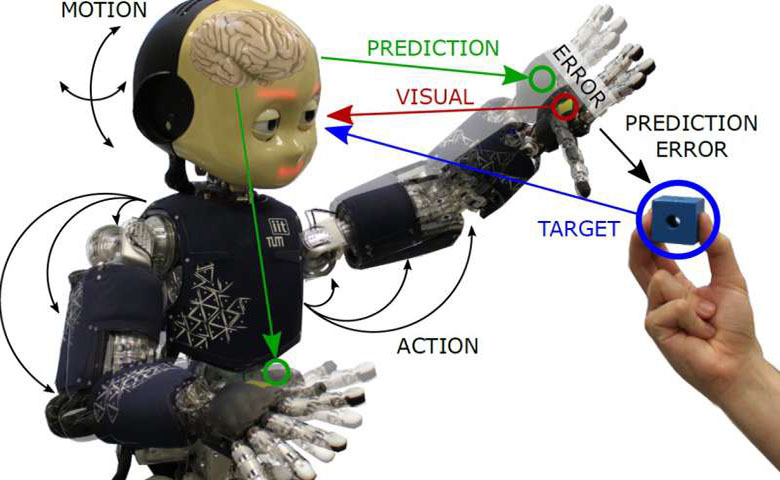
“从本质上讲,我们建议机器人使用其不完美的学习模型不断感知其身体,”参与该研究的另一位研究员Guillermo Oliver表示,“该算法基于自由能原理,提出了一个共同目标的感知和行动:减少预测误差。通过这种方法行动使感官数据更好地与内模型的预测相对应。”
Lanillos,Oliver和Gordon Cheng教授首次将主动推理应用于真实机器人。实际上,到目前为止,主动推理仅在理论上或在模拟中进行了测试,这些模拟部分偏向于所使用的模型的简化。
 该方法试图重现人类在特定情况下改变行动(如步态)的能力,例如,当他们接近地铁自动扶梯时,突然发现扶梯坏了或停止使用,会相应地调整动作。Lanillos,Oliver和Cheng开发的感知和控制算法在机器人中复制了类似的机制。
该方法试图重现人类在特定情况下改变行动(如步态)的能力,例如,当他们接近地铁自动扶梯时,突然发现扶梯坏了或停止使用,会相应地调整动作。Lanillos,Oliver和Cheng开发的感知和控制算法在机器人中复制了类似的机制。例如,在机器人需要触摸对象的任务中,模型在所需的手部位置中创建错误,从而触发对对象的动作。当机器人的手和物体处于相同位置时,获得平衡(或最小化)。
“这种方法在机器人社区很少见,但提供易处理性,允许来自不同来源的感官信息的组合,并允许根据精度调整每个传感器信息的可靠性,”Oliver说。
算法应用
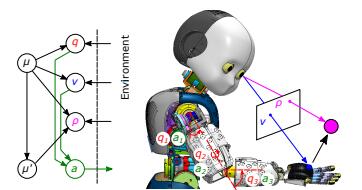
研究人员将他们的算法应用于iCub,一个开源的认知人形机器人,并评估了其在涉及双臂到达和主动头部跟踪的任务中的表现。在测试中,机器人能够执行先进和强大的到达行为,以及在其视野中对物体的主动头部跟踪。
Oliver表示,“人形机器人能够使用相同的数学模型对物体进行强大的双臂到达和视觉跟踪任务,通过这种类型的算法,我们希望通过强制执行闭环感知的思想来改变输入-输出感知流水线的当前视图(例如,最先进的神经网络),其中前向和后向传递在线处理,并将行动视为另一个不可避免的变数。”
研究结果表明,在真实环境中验证这样的模型是可能的,就像在有噪声的感觉信息、闭塞或只有部分信息可用时分析这些模型的优势一样。研究人员现在正计划将他们的模型应用于其他机器人,并测试其通用性。
团队表示,“从长远来看,我们希望能够开发出与人类具有相同身体适应和互动能力的智能体。与此同时,我们正在开发新的仿生人工智能算法。也许有一天能在机器上实现自我识别。”
论文:
arxiv.org/abs/1906.03022

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消