











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






MIT开发“微型乐高”机器人,可以用它制造组装其他机器人
2019年07月05日 由 马什么梅 发表
353099
0
 麻省理工学院的Neil Gershenfeld教授有一个大胆的想法:由于世界上所有的生物都是用20种氨基酸组合而成的,那么有没有可能创造一个只有20个基本部件的套件,可以用来组装所有不同的技术产品?
麻省理工学院的Neil Gershenfeld教授有一个大胆的想法:由于世界上所有的生物都是用20种氨基酸组合而成的,那么有没有可能创造一个只有20个基本部件的套件,可以用来组装所有不同的技术产品?他们的研究提供了当今构建机器人的替代方案,过去的方法主要分为两种类型:定制机器运行良好但相对昂贵且不灵活,而可重新配置的机器人牺牲性能以实现多功能性。
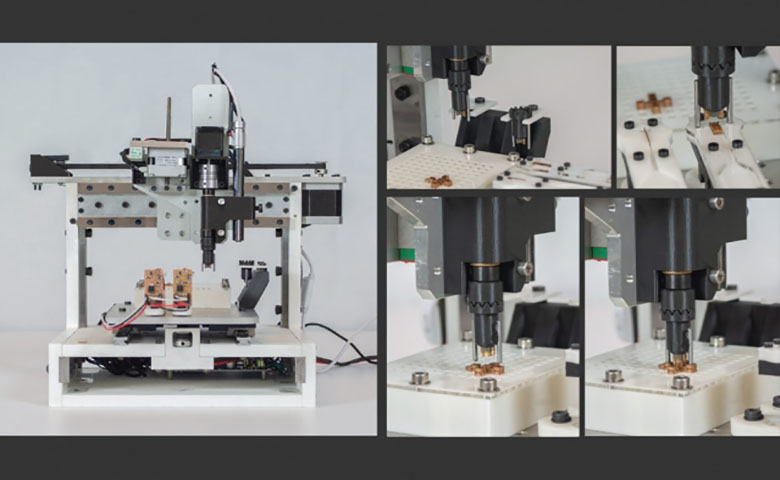
在新的方法中,团队利用生命体的灵感,通过创造五个不同的部件来构建一个微型电动机器人。这些部件是可定制的,可以便宜并快速地组装机器人。
五个模块
它仅由五个模块化部件组成:刚性和柔性部件,电磁,线圈和磁铁。
 使用这个简单的微型零件套件,Langford将它们组装成一种新型电机,可以分离机械步骤移动附件,可用于转动齿轮,以及将这些步骤转变为运动的电机的移动形式,允许它以一种让人想起移动肌肉的分子马达的方式“穿过”表面。
使用这个简单的微型零件套件,Langford将它们组装成一种新型电机,可以分离机械步骤移动附件,可用于转动齿轮,以及将这些步骤转变为运动的电机的移动形式,允许它以一种让人想起移动肌肉的分子马达的方式“穿过”表面。根据特定任务的需要,这些部件也可以组装成用于抓握的手或用于行走的腿,然后随着这些需求的改变而重新组装。Gershenfeld将它们称为“数字材料”,能够可逆地连接的离散部件,形成一种功能性的“微型乐高”。
这些部件固定在附件上,然后可以爬行,推动,抓紧并完成更复杂的机器人难以完成的任务,或需要更复杂和刚性结构的任务。它可以用来执行你想要的任务,而不会过于复杂化。
因此,可以说Gershenfelt和他的团队创造了一种替代以前已知的建造机器人的方法。
实用性
这些部件可以用作标准化的部件套件,可以组装成执行特定任务的机器人。然后可以容易地组装和拆卸这些机器人以执行不同的任务。
这种机器很强大,它可以承受比自身重七倍的物体。即使具备所有这些功能,电机也可以根据特定需求的变化重新组装,或者处理不同的任务。就像蚂蚁一样,它可以用来执行一些非常重要的任务。
如果机器人需要以更复杂的方式移动,这些部件可以分布在整个结构中。可以选择构建块的大小以匹配其应用。该团队已经制作了纳米尺寸的零件来制作纳米机器人和米尺寸的零件来制作megarobots。以前,在这些长度范围极端的每一个都需要专门的技术。
Gershenfeld表示,“想象一下生产电子产品和机器人的3D打印机,另外一个新兴的应用是制造可在狭窄空间内工作的小型机器人。” 他们创造的一些机器人小于一分钱硬币。这对于进入狭小空间非常有用。
或者可以将机器人组装得更大并且可以大规模移动,它也可以解决大型或小型项目。
这可能会将机器人技术引入新方向,帮助行业为大多数人提供机器人,而不仅仅是提供给那些能够负担得起高价的,或只有那些知道如何处理非常小众机器人的人。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消