











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






机器手像人手一样转动魔方,旋转成功率达到95.2%
2019年07月30日 由 马什么梅 发表
75892
0
 人类可以相对轻松地操纵魔方,但机器人则难以操作。经典的2 x 2 x 2魔方有3674160种配置。那么能够自由操控魔方的机器手意味着更灵活。
人类可以相对轻松地操纵魔方,但机器人则难以操作。经典的2 x 2 x 2魔方有3674160种配置。那么能够自由操控魔方的机器手意味着更灵活。腾讯和香港中文大学的研究人员设计了一个多指的魔方控制器。在论文中,团队声称他们的AI动力系统在1,400次试验中平均成功率达到90.3%,其中包括一个确定最佳移动序列的立方体求解器,一个五个手指的立方体控制器。
系统结构
灵巧的手部操作是机器人达到人类水平的灵活性的关键组成部分,并能完成涉及丰富接触的日常任务。尽管取得了一致的进展,但可靠的多指灵巧操作仍然是一个开放的挑战,因为它具有复杂的接触模式、高维的动作空间和脆弱的机械结构。
该团队的解决方案是一个分层系统,它结合了基于模型和无模型的规划和操作组件。上述立方体求解器为解决魔方找到最佳移动序列,由两个原子动作,立方体旋转和逐层操作组成的控制器,逐步执行每个移动。
 团队指出,运动学和关节运动使得一些动作比其他动作更难完成。为了定量比较它们的可靠性,分别训练了几个模型。
团队指出,运动学和关节运动使得一些动作比其他动作更难完成。为了定量比较它们的可靠性,分别训练了几个模型。为了提高立方体旋转和逐层操作的稳健性,这些操作是在没有反馈信号的情况下顺序执行的,它们实现了一个回滚机制,可以检查每个步骤中魔方的状态。
验证灵活性
团队使用Roboti的多关节动力学与Contact(Mujoco)来验证他们的方法。这是一个专为机器人和生物力学研究和开发而设计的物理引擎。
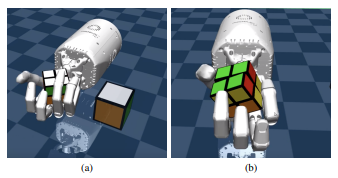
在Mujoco内部,他们使用了一个灵巧的人类大小的机械手,名为Shadow Hand,它的中指和无名指各有三个驱动关节和一个欠驱动关节,小指和拇指有五个驱动关节(加上一个带有两个驱动关节的手腕)。
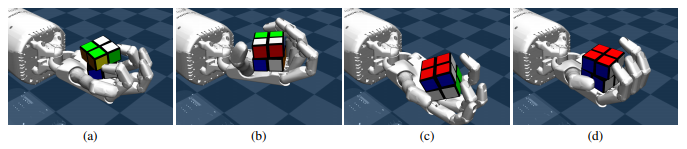 在一个实验中,Shadow Hand的任务是操纵一个虚拟的魔方来实现一个目标姿态,而在另一个实验中,它必须操纵两层来实现一个目标角度。
在一个实验中,Shadow Hand的任务是操纵一个虚拟的魔方来实现一个目标姿态,而在另一个实验中,它必须操纵两层来实现一个目标角度。研究人员报告说,模型操控稳定的立方体旋转成功率超过90%,在训练30000次之后提升到95.2%,平均分层操作成功率为90.3%。之后的研究通过联合优化两个原子操作并在真实硬件上部署系统,可以进一步提高性能。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消