











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






Google Brain的ROBEL基准,未来机器人领域的发展趋势
2019年10月10日 由 TGS 发表
250082
0
 用于衡量控制机器人的人工智能系统性能基准,往往局限于为工业环境设计的昂贵硬件——这些硬件的成本可能高达数万美元。来自加州大学伯克利分校(UC Berkeley)和谷歌Brain的研究人员解决了这个问题,他们引入了“低成本机器人学习基准”(ROBEL),这是一个开源平台,旨在鼓励快速实验和硬件强化学习。
用于衡量控制机器人的人工智能系统性能基准,往往局限于为工业环境设计的昂贵硬件——这些硬件的成本可能高达数万美元。来自加州大学伯克利分校(UC Berkeley)和谷歌Brain的研究人员解决了这个问题,他们引入了“低成本机器人学习基准”(ROBEL),这是一个开源平台,旨在鼓励快速实验和硬件强化学习。此外,ROBEL还提供了专门用于跟踪低成本机器人的人工智能系统质量基准。因为采用更便宜的机器人设计用于工作平台,可能会更让开发人员、学生、或初创企业感兴趣,以推进该领域的发展。
ROBEL基准是为执行D 'Claw的“旋转和拧紧”以及D 'Kitty的“站立和行走”等任务而设计的。一只擅长拧开东西的机械手可以用来操作工厂里的阀门,或者是用来打开一个罐子,而一个知道如何用四条腿走路的机器人可以用移动来爬过障碍物。
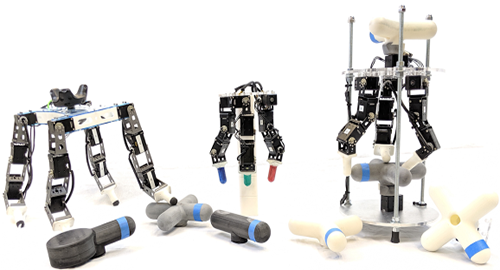 而更为至关重要的是,ROBEL可与价格相对低廉,由Trossen Robotics制造的三指机器人手D’Claw和四腿机器人D’Kitty一起使用。D’Claw是9自由度(9DoF)设备,售价3200美元,D’Kitty则是12自由度(12DoF)设备,售价3700美元。
而更为至关重要的是,ROBEL可与价格相对低廉,由Trossen Robotics制造的三指机器人手D’Claw和四腿机器人D’Kitty一起使用。D’Claw是9自由度(9DoF)设备,售价3200美元,D’Kitty则是12自由度(12DoF)设备,售价3700美元。ROBEL制造商在arXiv网站上发表的一篇论文中说:“因为这些低成本的模块化机器人易于维护,而且足够强大,可以从头开始进行硬件强化学习,迄今为止,我们已经注册了超过14000个小时的训练。”
相比之下,虽然索耶(Sawyer)和巴克斯特(Baxter)机器人在实验室环境中享有盛誉,但价格可能会超过1.5万美元。近几个月来,降低成本和提高负担能力一直是机器人研究人员关注的焦点。
今年上半年,加州大学伯克利分校(UC Berkeley)发布了Blue,这是一款配有钳子的双臂机器人,售价不到5000美元。夏天,Facebook人工智能研究中心(AI Research)发布了机器人框架PyRobot,并与价值5000美元的机器人LoCoBot进行了合作。以上这些,充分预示了降低成本将是未来很长一段时间内机器人研究的重点。
今年的十月三十日,ROBEL将会在东京大学举行的机器人大会上发表,如果您感兴趣,可以点击文末链接进行了解。
CoRL-2019链接:https://www.robot-learning.org/

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消