











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






IROS 2019——九号机器人挑战赛夺冠
2019年11月05日 由 TGS 发表
414996
0
 2019年IEEE / RSJ国际智能机器人和系统国际会议(IROS 2019),于11月4日正式开幕。据相关数据统计,大会吸引了4000多名世界各地的机器人、自动化系统及人工智能等领域的专业人士、顶尖研究团队代表及企业界人士参加交流。
2019年IEEE / RSJ国际智能机器人和系统国际会议(IROS 2019),于11月4日正式开幕。据相关数据统计,大会吸引了4000多名世界各地的机器人、自动化系统及人工智能等领域的专业人士、顶尖研究团队代表及企业界人士参加交流。除了聚焦最新机器人研究成果,IROS还举办了机器人比赛,以更为直接而又轻松的方式展现机器人的魅力。
IROS 2019
 IROS是机器人技术和智能系统的旗舰国际会议,由IEEE,IEEE机器人与自动化学会(RAS),IEEE工业电子学会(IES),日本机器人学会(RSJ),仪器与控制工程师学会(SICE)和新技术基金会(NTF)联合举办。——IEEE是一个非盈利性的技术专业协会,在160个国家/地区拥有400,000多名成员。它是从计算机工程,生物医学技术和电信到电力,航空航天和消费电子等技术领域的领先权威。
IROS是机器人技术和智能系统的旗舰国际会议,由IEEE,IEEE机器人与自动化学会(RAS),IEEE工业电子学会(IES),日本机器人学会(RSJ),仪器与控制工程师学会(SICE)和新技术基金会(NTF)联合举办。——IEEE是一个非盈利性的技术专业协会,在160个国家/地区拥有400,000多名成员。它是从计算机工程,生物医学技术和电信到电力,航空航天和消费电子等技术领域的领先权威。它是智能机器人与自动化领域的两个顶级国际会议之一,每一届IROS会议及其展会的举办都获得了极大的成功,对相关领域的技术发展起到了重要的促进作用。IROS 2019是IROS第32届会议,各行各业的领军人物、顶尖研究团队代表及企业界人士将齐聚澳门,襄此盛会,共同探索智能机器人与系统领域的前沿科技,分享并讨论相关领域的最新进展。会期至本月8日,会议主要包括:全体会议、主题演讲、技术会议、工作坊和教程、论坛、挑战赛、以及展览会。
本次大会以机器人连接人为主题,旨在推进机器人技术发展,让机器变得更有温度。大会精彩赛事不容错过,如想了解详情,请点击文末链接浏览大会网站,进行相关内容查询观看。
SLAM挑战赛
 机器人自诞生以来,就有一个宏大的终极目标——代替人类从事繁重、危险的工作。想要机器人在现实环境中具有实用性,必需要响应和适应人类与环境的变化,而机器人的「眼睛」——机器视觉,可以通过光学装置和传感器让机器人通过图像认知周围环境,并做出相应的判断和决策。今年的IROS机器人挑战赛有两项,Lifelong SLAM - 适应场景变化的定位算法竞赛是其中之一。
机器人自诞生以来,就有一个宏大的终极目标——代替人类从事繁重、危险的工作。想要机器人在现实环境中具有实用性,必需要响应和适应人类与环境的变化,而机器人的「眼睛」——机器视觉,可以通过光学装置和传感器让机器人通过图像认知周围环境,并做出相应的判断和决策。今年的IROS机器人挑战赛有两项,Lifelong SLAM - 适应场景变化的定位算法竞赛是其中之一。SLAM,即“同时定位与建图” 旨在使机器人在移动过程中能够自主估计自身所处的位置和姿态,是机器人领域的核心问题之一。
 简单来说,SLAM指的是,当机器人到达一个完全陌生的环境中时,它需要精准地建立时间和空间的对应关系,并能完美地知道:我刚才在哪里?现在在哪里?我看到了什么?现在看到的和之前看到的有什么不一样?如果迷路了我该怎么办?等等一系列问题。
简单来说,SLAM指的是,当机器人到达一个完全陌生的环境中时,它需要精准地建立时间和空间的对应关系,并能完美地知道:我刚才在哪里?现在在哪里?我看到了什么?现在看到的和之前看到的有什么不一样?如果迷路了我该怎么办?等等一系列问题。通常情况下,研究SLAM往往着重考察机器人在静态环境中或在包含某些明显动态特性场景中的定位精准度,从而忽视掉场景变化所带来的定位失败和错误匹配问题。因此,本次比赛提出定位成功率这一指标,着重考察SLAM算法能否在视角、光照和场景布置发生变化时稳定识别自身位置,从而支持机器人的长期部署。
九号机器人荣获冠军
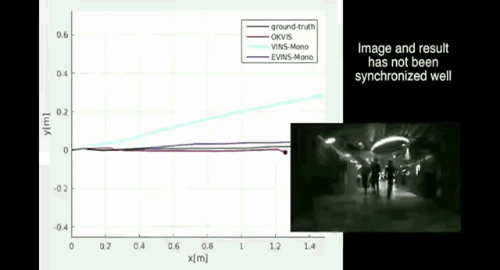
 挑战赛上,Segway Robotics团队研发的Segway配送机器人S1数据收集表现优异。据介绍,S1上加装了RealSense D435i摄像机和RealSense T265摄像机两个传感器来采集图像数据,两者均安装在大约1m的固定高度上。据参赛工程师透露,Segway Robotics团队在Segway配送机器人S1原有的定位算法框架下,融合了深度学习的特征匹配和场景重定位,使机器人通过视觉进行持续自我定位的能力大大提高,综合评估分数位列第一名,获得了本次挑战赛冠军宝座。
挑战赛上,Segway Robotics团队研发的Segway配送机器人S1数据收集表现优异。据介绍,S1上加装了RealSense D435i摄像机和RealSense T265摄像机两个传感器来采集图像数据,两者均安装在大约1m的固定高度上。据参赛工程师透露,Segway Robotics团队在Segway配送机器人S1原有的定位算法框架下,融合了深度学习的特征匹配和场景重定位,使机器人通过视觉进行持续自我定位的能力大大提高,综合评估分数位列第一名,获得了本次挑战赛冠军宝座。据了解,Segway Robotics隶属于九号机器人,致力于机器人创新领域的业务。该团队从2015年起就深耕机器人领域,专注于研发、生产和推广针对个人消费者和企业级市场的智能机器人,拥有全球领先的人工智能算法研发能力,以及硬件整机的研发与量产能力。
 Segway Robotics一直很重视学术前沿和工程落地探索相结合,每年都会投入人力和实习生项目在参加各种学术会议赛事。
Segway Robotics一直很重视学术前沿和工程落地探索相结合,每年都会投入人力和实习生项目在参加各种学术会议赛事。在刚刚结束的两年一届的由北航、商汤科技、中科院、中大举办的 ICCV 2019(International Conference on Computer Vision)人-物交互检测竞赛中,Segway Robotics培养的实习生队伍,获得了【现实生活场景的人和物体的关系交互检测】项目的第二名。
本次夺冠,无疑是对Segway Robotics在SLAM方向多年的技术累积的充分肯定,正应了那句话:有志者事竟成,苦心人天不负。
参考来源:维基百科、IROS 2019官网、凤凰财经、贤集网。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com
上一篇
我的脸难道我还做不了主了?!








广告


写评论取消
回复取消