











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






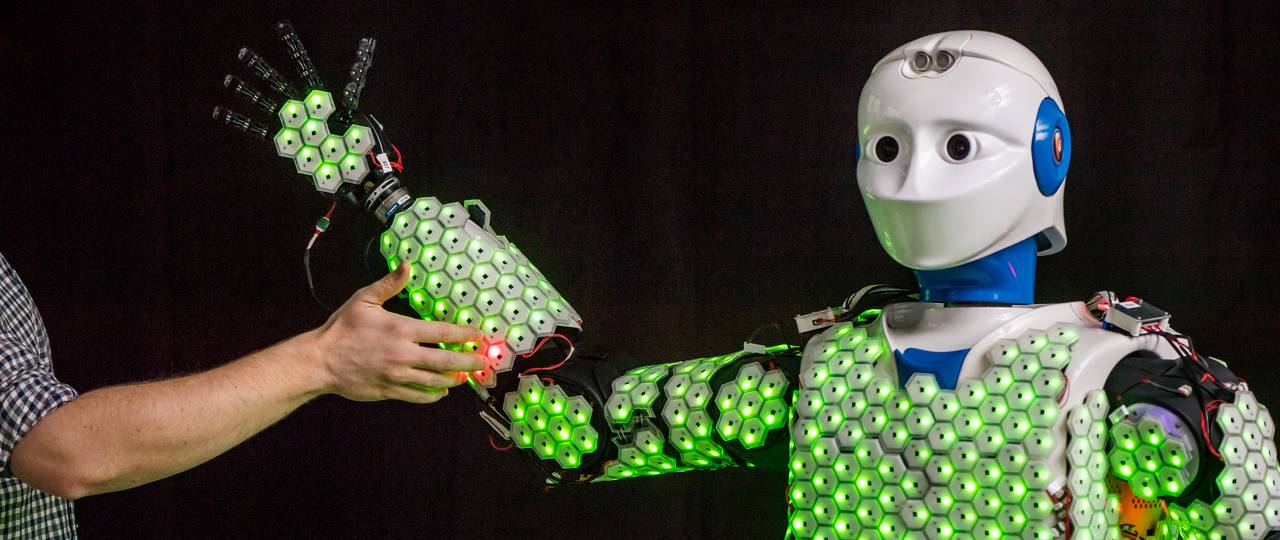
科学家为机器人开发了人造皮肤使其获得触觉
2019年12月02日 由 KING 发表
871233
0
 1970年使机器人能够感知自己的境,这是一项至关重要的能力但是,发展机器人皮肤存在障碍。人皮肤约有500人造连续处理很快就达到极限。到现为止,以前的系统很快就被来自数百个传感器的数据超载。
1970年使机器人能够感知自己的境,这是一项至关重要的能力但是,发展机器人皮肤存在障碍。人皮肤约有500人造连续处理很快就达到极限。到现为止,以前的系统很快就被来自数百个传感器的数据超载。
[video width="1280" height="720" mp4="https://www.atyun.com/uploadfile/2019/12/Sensitive-Skin-for-Robots.mp4"][/video]

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消