











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






困惑时会向你寻求帮助的机器人
2019年12月05日 由 TGS 发表
938771
0
 人工智能模型总是会遇到模棱两可的情况,这种情况下它们很难只用指令做出反应。这对自主代理来说是一个不小的问题,比如说它们要在一间公寓里穿行,就会面临着被多条路径困住的风险,类比一下,套用在人类身上,就是典型的“选择困难症”。
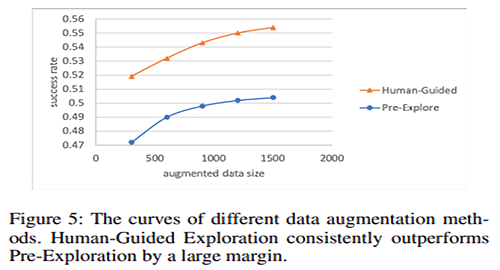
人工智能模型总是会遇到模棱两可的情况,这种情况下它们很难只用指令做出反应。这对自主代理来说是一个不小的问题,比如说它们要在一间公寓里穿行,就会面临着被多条路径困住的风险,类比一下,套用在人类身上,就是典型的“选择困难症”。为了解决这个问题,亚马逊Alexa AI部门的研究人员开发了一个框架,赋予代理机器人在特定情况下请求帮助的能力。框架使用了基于模型混淆的方法,能根据预定义的信心阈值确定的他们的混淆程度来提问,研究人员称:这个阈值将自主代理的成功率至少提高了15%。
在一份预印本论文中,研究人员写道:“设想这样一种情况,你想让一个机器人助手把你的钱包放在床上……场景中有两扇门,但预设指令只告诉它穿过门口。在这种情况下,机器人显然很难知道该从哪扇门进入。经过长时间的探索,我们找到了一种思路:如果机器人能够与用户讨论、求助,那么现实情况的模糊性就可以得到解决。”
 该团队的框架采用了两种代理模型:模型混淆(Model Confusion)和动作空间扩展(Action Space augation),前者能够模仿人类用户在混淆情况下的行为,后者则是一种更复杂的算法,可以自动学会在导航过程中,在正确的时间只问必要的问题。最后再用人工交互数据进一步微调第二个模型,以达到让机器人熟悉环境的目的。
该团队的框架采用了两种代理模型:模型混淆(Model Confusion)和动作空间扩展(Action Space augation),前者能够模仿人类用户在混淆情况下的行为,后者则是一种更复杂的算法,可以自动学会在导航过程中,在正确的时间只问必要的问题。最后再用人工交互数据进一步微调第二个模型,以达到让机器人熟悉环境的目的。在本研究中,当机器人在模拟房屋中导航时,如果迷路了,它就会发出“我迷路了,请帮帮我!”的讯号,并寻求帮助。当用户为机器人的后续问题提供答案时,动作空间的扩展,会修正原本错误的轨迹,并利用反馈系统来防止未来发生同样的错误。
研究人员编制了一个包含21,567条导航指令的数据集,一个指令词汇大约由3100个单词组成。然后,他们进行实验,评估了机器人的成功率和步数,这个“成功”的标准是:导航误差小于3米。
如果这条新提出的策略能够成功,那么,可能会对亚马逊传闻已久的家用机器人有所启发,加快其面世的进度。此外,亚马逊的这个新策略显然对不断学习的场景很有用——因为,应用了这个亚马逊策略的家务机器人,可以在客户家中不断改进其性能。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消