











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






DRIVE Labs:本地化如何帮助车辆找到道路
2020年01月17日 由 KING 发表
810737
0
[video width="1280" height="720" mp4="https://www.atyun.com/uploadfile/2020/01/Lost-in-Space-Localization-Helps-Self-Driving-Cars-Find-Their-Way-1.mp4"][/video]
精确定位导航
大众市场解决方案
冗余与多样性
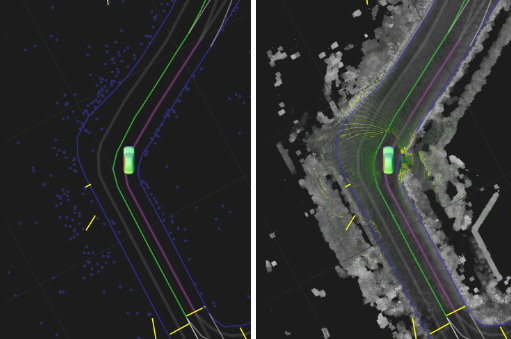
除摄像机本地化外,DRIVE Localization还可以与雷达(顶部)和激光雷达(底部)一起使用。在顶部图像中,蓝点是实时雷达响应。底部图像显示了激光雷达反射率图像和实时激光雷达点(绿色)。
DRIVE Localization的一个示例是同时融合来自摄像头,雷达和激光雷达的本地化结果。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消