











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






人工智能帮助家庭机器人将计划时间缩短一半
2023年07月18日 由 Samoyed 发表
761079
0
你的全新家用机器人被送到你家,你让它给你冲杯咖啡。虽然它从之前的模拟厨房实践中掌握了一些基本技能,但它可进行的动作太多了——打开水龙头、冲马桶、倒面粉,等等。但是,对于这个任务来说,只有一小部分动作是有用的。在新的环境中,机器人该如何判断哪些步骤是有用的呢?
它可以使用PIGINet,这是一个可以有效增强家庭机器人的问题解决能力的新系统。麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员正在利用机器学习来减少做出计划所需的时间。当仅训练300-500个问题时,PIGINet可以消除无法满足无碰撞要求的任务计划,将计划时间缩短了50%-80%。
通常,机器人会尝试各种任务计划,并不断进行改进,直到找到可行的解决方案。这可能是低效和耗时的。例如,在烹饪之后,您可能想将所有酱料放在橱柜里。这个问题可能需要两到八个步骤,这取决于当时的环境是什么样子的。机器人需要打开多个橱柜门吗?橱柜里是否需要重新摆放物品以便腾出空间?
家庭机器人通常是按照预定义的配方执行任务,但这并不总适用于多样化或不断变化的环境。那么,PIGINet如何避免那些预定义的规则呢?PIGINet是一个神经网络,它接收“Plans、Images、Goal和Initial facts”,然后预测一个任务计划是否有可能通过改进来找到可行的运动计划。
简单来说,它采用了转换编码器,这是一个多功能的、先进的模型,专为处理数据序列而设计。在这种情况下,输入序列是有关正在考虑的任务计划、环境图像以及初始状态和期望目标的符号编码的信息。编码器将任务计划、图像和文本结合起来,生成有关所选任务计划可行性的预测。
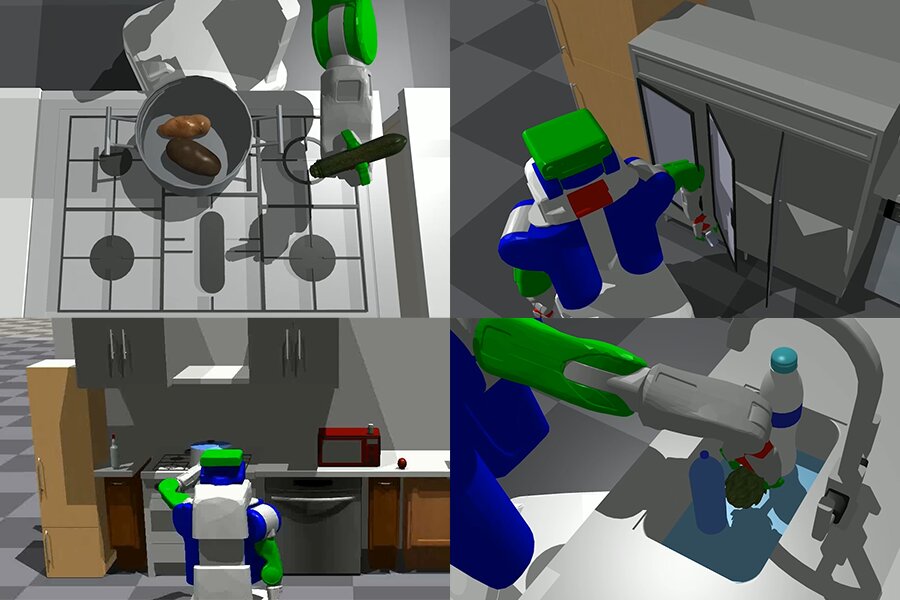
以厨房为例,团队创建了数百个模拟环境,每个环境具有不同的布局和在柜台、冰箱、橱柜、水槽和锅之间重新排列物体的特定任务。通过测量解决问题所需的时间,他们将PIGINet与之前的方法进行了比较。一个正确的任务计划可能包括打开左侧的冰箱门、取下锅盖、将卷心菜从锅里移到冰箱、将土豆移到冰箱、从水槽里拿起瓶子、将瓶子放入水槽、拿起番茄或放下番茄。PIGINet在简单情景中将规划时间缩短了80%,在更复杂的情景中降低了20%至50%的规划时间。
麻省理工学院教授和CSAIL首席研究员Leslie Pack Kaelbling说:“像PIGINet这样的系统,可以利用数据驱动方法的力量来有效地处理熟悉的案例,也仍然可以依靠‘第一原则’规划方法来验证基于学习的建议和解决新问题,为各种问题提供可靠高效的通用解决方案,融合了两者的优点。”
PIGINet在输入序列中使用多模态嵌入,可以更好地表示和理解复杂的几何关系。利用图像数据帮助模型在不知道物体三维网格的情况下,掌握物体的空间排列和结构,进行精确的碰撞检查,从而在不同环境下快速决策。
在开发PIGINet过程中面临的主要挑战之一是缺乏良好的训练数据,因为所有可行和不可行的计划都需要由传统规划器生成,而这本身就很慢。然而,通过使用预训练的视觉语言模型和数据增强技巧,团队解决了这个挑战,不仅在处理已知物体的问题上显示出惊人的结果,还可以对以前未见过的对象进行零样本泛化。
“因为每个人的家都不一样,机器人应该具有强大的适应性,而不仅仅是按照固定流程执行任务。我们的主要目标是让通用任务规划器生成候选任务计划,并使用深度学习模型选择最合理的任务计划。此外,PIGINet的实际应用并不局限于家庭,”麻省理工学院CSAIL博士生、该研究的主要作者Zhutian Yang说。
“我们未来的目标是进一步完善PIGINet,在确定不可行的行动后提出替代任务计划,这将进一步加快可行任务计划的生成,而不需要大数据集从头开始训练通用规划器。我们相信,这将彻底改变机器人在开发过程中的训练方式,然后将其应用到每个人的家中。”
Beomjoon Kim博士说:“这篇论文解决了实现通用机器人的基本问题:如何从过去的经验中学习,在充满大量可移动和可配置障碍的无结构环境中加快决策过程。这类问题的核心瓶颈在于如何确定高层任务计划,以便存在一个实现高层计划的低层运动计划。通常情况下,你必须在运动规划和任务规划之间循环,这会导致计算效率低下。Zhutian的工作通过使用学习来消除不可行的任务计划,朝着一个可行的方向迈出了一步。”
来源:https://techxplore.com/news/2023-07-ai-household-robots.html
它可以使用PIGINet,这是一个可以有效增强家庭机器人的问题解决能力的新系统。麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员正在利用机器学习来减少做出计划所需的时间。当仅训练300-500个问题时,PIGINet可以消除无法满足无碰撞要求的任务计划,将计划时间缩短了50%-80%。
通常,机器人会尝试各种任务计划,并不断进行改进,直到找到可行的解决方案。这可能是低效和耗时的。例如,在烹饪之后,您可能想将所有酱料放在橱柜里。这个问题可能需要两到八个步骤,这取决于当时的环境是什么样子的。机器人需要打开多个橱柜门吗?橱柜里是否需要重新摆放物品以便腾出空间?
家庭机器人通常是按照预定义的配方执行任务,但这并不总适用于多样化或不断变化的环境。那么,PIGINet如何避免那些预定义的规则呢?PIGINet是一个神经网络,它接收“Plans、Images、Goal和Initial facts”,然后预测一个任务计划是否有可能通过改进来找到可行的运动计划。
简单来说,它采用了转换编码器,这是一个多功能的、先进的模型,专为处理数据序列而设计。在这种情况下,输入序列是有关正在考虑的任务计划、环境图像以及初始状态和期望目标的符号编码的信息。编码器将任务计划、图像和文本结合起来,生成有关所选任务计划可行性的预测。
以厨房为例,团队创建了数百个模拟环境,每个环境具有不同的布局和在柜台、冰箱、橱柜、水槽和锅之间重新排列物体的特定任务。通过测量解决问题所需的时间,他们将PIGINet与之前的方法进行了比较。一个正确的任务计划可能包括打开左侧的冰箱门、取下锅盖、将卷心菜从锅里移到冰箱、将土豆移到冰箱、从水槽里拿起瓶子、将瓶子放入水槽、拿起番茄或放下番茄。PIGINet在简单情景中将规划时间缩短了80%,在更复杂的情景中降低了20%至50%的规划时间。
麻省理工学院教授和CSAIL首席研究员Leslie Pack Kaelbling说:“像PIGINet这样的系统,可以利用数据驱动方法的力量来有效地处理熟悉的案例,也仍然可以依靠‘第一原则’规划方法来验证基于学习的建议和解决新问题,为各种问题提供可靠高效的通用解决方案,融合了两者的优点。”
PIGINet在输入序列中使用多模态嵌入,可以更好地表示和理解复杂的几何关系。利用图像数据帮助模型在不知道物体三维网格的情况下,掌握物体的空间排列和结构,进行精确的碰撞检查,从而在不同环境下快速决策。
在开发PIGINet过程中面临的主要挑战之一是缺乏良好的训练数据,因为所有可行和不可行的计划都需要由传统规划器生成,而这本身就很慢。然而,通过使用预训练的视觉语言模型和数据增强技巧,团队解决了这个挑战,不仅在处理已知物体的问题上显示出惊人的结果,还可以对以前未见过的对象进行零样本泛化。
“因为每个人的家都不一样,机器人应该具有强大的适应性,而不仅仅是按照固定流程执行任务。我们的主要目标是让通用任务规划器生成候选任务计划,并使用深度学习模型选择最合理的任务计划。此外,PIGINet的实际应用并不局限于家庭,”麻省理工学院CSAIL博士生、该研究的主要作者Zhutian Yang说。
“我们未来的目标是进一步完善PIGINet,在确定不可行的行动后提出替代任务计划,这将进一步加快可行任务计划的生成,而不需要大数据集从头开始训练通用规划器。我们相信,这将彻底改变机器人在开发过程中的训练方式,然后将其应用到每个人的家中。”
Beomjoon Kim博士说:“这篇论文解决了实现通用机器人的基本问题:如何从过去的经验中学习,在充满大量可移动和可配置障碍的无结构环境中加快决策过程。这类问题的核心瓶颈在于如何确定高层任务计划,以便存在一个实现高层计划的低层运动计划。通常情况下,你必须在运动规划和任务规划之间循环,这会导致计算效率低下。Zhutian的工作通过使用学习来消除不可行的任务计划,朝着一个可行的方向迈出了一步。”
来源:https://techxplore.com/news/2023-07-ai-household-robots.html

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消